A unit vector is a vector with magnitude
equal to 1. Thus, what distinguishes different unit vectors is their
direction and any possible direction in space can be associated with
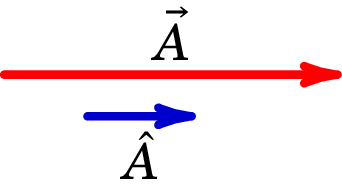
a unit vector. If we divide a vector by its magnitude, the
result is a unit vector, in the direction of , which we will
dub as , with a circumflex accent rather than an arrow, to
distinguish it from :
(2.1)
Vector is then characterized by a positive scalar , its
magnitude, and a unit vector which defines its direction
(see figure 2.1). The vector is the product of its magnitude and its
unit vector: .
Figure 2.1: Unit vector in the direction of a vector
.
2.2 Vectors on a plane
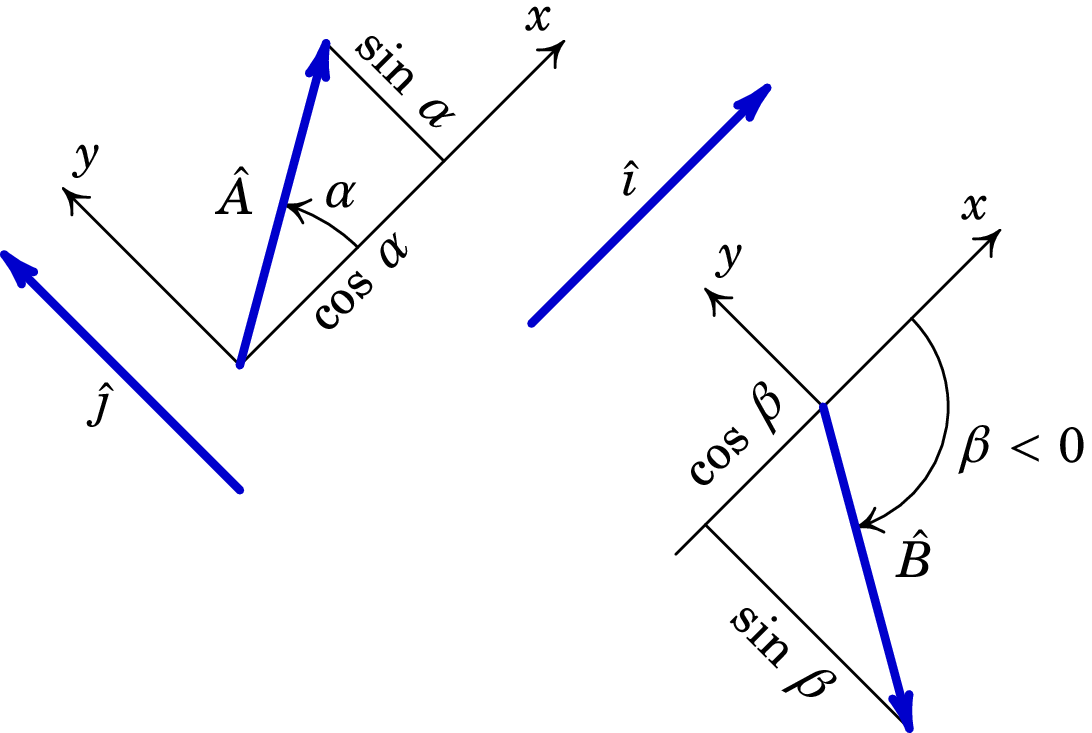
If we choose a particular direction on the plane and call the unit
vector in that direction , any other unit vectors
, , etc. can be defined with just one number, the
angle between those unit vectors and . In Figure 2.2,
the unit vector makes an angle with vector
, in the counterclockwise direction. Rotating an angle
from the direction of in the clockwise
direction leads to another direction different from ; to
distinguish those two directions, we give a positive sign to one of
them and a negative sign to the other. The unit vector ,
perpendicular to defines the direction in which we
consider the angle with positive. The angle of
unit vector in figure 2.2 is then negative.
Figure 2.2: Unit vectors and their relation to unit vectors
and .
.
The directions of the two unit vectors and
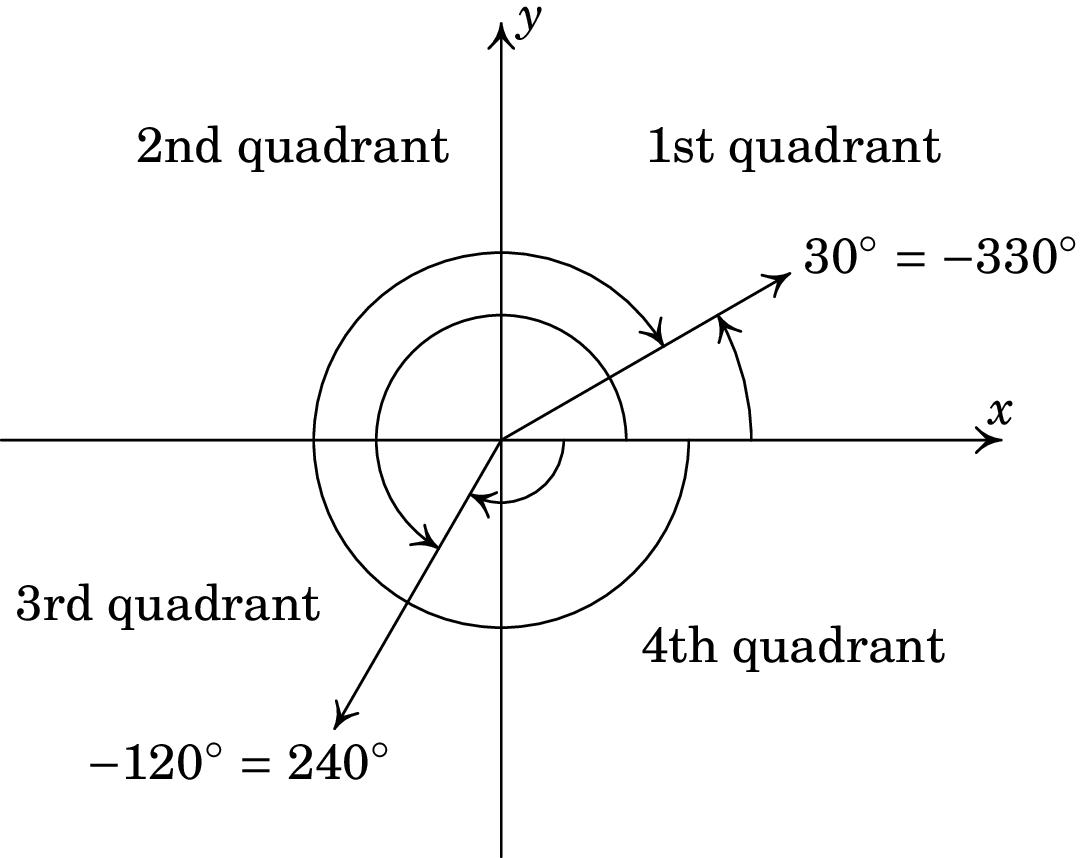
are usually called the and directions. Notice
that every direction in space can be defined by a positive or a
negative angle. In Figure 2.3 we show the direction +30°, which is
the same as the -330° direction, and the direction −120°, which is
the same as the direction 240°. Here we chose to use values between
−180° and 180° (between and radians).
Figure 2.3: In an axes system, all directions can be
divided into 4 quadrants.
Whatever value you choose for a direction with angle ,
and will give the correct
values of the projections of a unit vector in that direction along
the and axes. The projection along the axis, ,
will be positive if the direction is in the first or fourth
quadrants (see Figure 2.3), or negative if it is in the second or
third quadrants. The projection along the axis, ,
is positive in the first and second quadrants and negative in the
third and fourth quadrants. Any unit vector can then be
written as,
(2.2)
where is the angle that does with the axis.
Vector , which is the product of its magnitude times the
unit vector , can be written as the sum of two vectors
and , in the directions of and
:
(2.3)
where and are called
rectangular component vectors and
the rectangular components of the vector
are
(2.4)
Conversely, given the rectangular components and of a
vector, we can find its magnitude and direction through,
(2.5)
But since , there will be directions
in the first and third quadrants with the same value of
and the same for directions in the second and fourth quadrants. The
value of can then be computed as:
(2.6)
Computer programs usually include an extra function to compute inverse
tangents given two parameters, the two rectangular components,
returning a result in agreement with equation 2.6.
2.2.1 Scalar multiplication
Using the associative property of scalar multiplication, the product of
scalar times a vector
is equal to,
(2.7)
Thus, each rectangular component is multiplied by the scalar.
2.2.2 Vector addition in rectangular components
In rectangular components, the sum of and
is,
Using the commutative property of vector addition and the
distributive law of scalar multiplication, we arrive at the result:
(2.8)
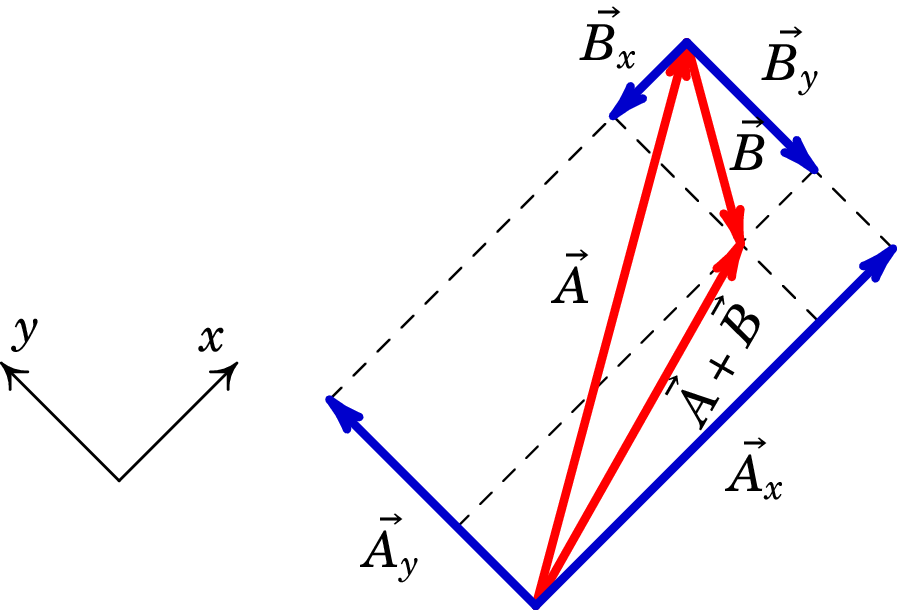
Namely, each rectangular component of the sum is equal to the sum of
the corresponding components of vectors and
. Figure 2.4 shows the vectors (in red), their component
vectors (in blue), and the sum of the vectors (in red). The same result is
obtained by adding the vectors or by adding their component vectors
instead.
Figure 2.4: The sum of two vectors is equal to the sum of their
rectangular component vectors.
Example 2.1
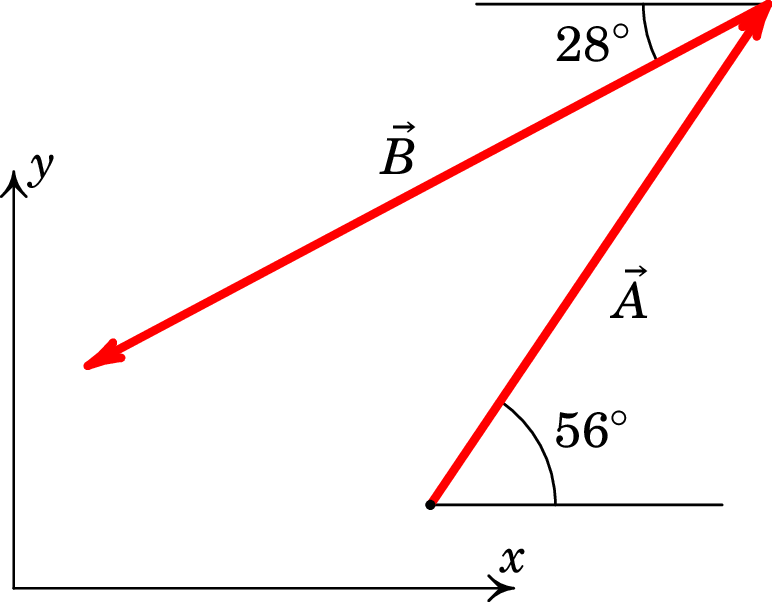
A plane moves 580 km in direction 56° north of the east during its
first hour of flight and 740 km in direction 28° south of the west
during its second hour of flight. Find the total displacement of the
plane during those two hours, giving its magnitude and direction.
Solution: The following diagram shows the plane's displacements
and during the first and the second hour, using
axis in the east direction and axis in the north direction.
The rectangular components of those vectors, in km, are then,
The total displacement is the sum of the two vectors:
The magnitude of that total displacement is,
And the angle it makes with the east direction is,
Namely, the total displacement was 355 km in the direction 22° north
of the west.
2.2.3 Dot product in rectangular components
To derive the expression of the dot product in rectangular components,
we first notice that since both and have
magnitude equal to 1 and they are perpendicular to each other, we then
have,
(2.9)
We can then apply the distributive law for the dot product:
This leads us to the result,
(2.10)
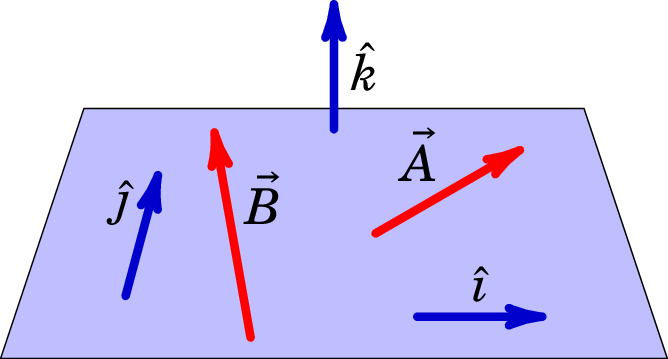
2.2.4 Cross product in rectangular components
The cross product of any vector with itself is zero and the cross
product of two perpendicular vectors has magnitude 1 and is
perpendicular to those vectors. Therefore, we have the following
properties for the rectangular unit vectors:
(2.11)
Where is the unit vector perpendicular to the plane , in
the direction of the right-hand rule from to
(see figure 2.5).
Figure 2.5: Vectors and on the plane of
and whose perpendicular unit-vector is
.
In rectangular coordinates, the cross product between vectors
and is,
And the result is:
(2.12)
Therefore, the magnitude of the cross product between the two vectors
can be written as the absolute value of a determinant where the first
row is the rectangular components of and the second row us
the rectangular components of :
(2.13)
If the determinant above is positive, the cross product
is in the direction and if it is
negative, the cross product is in the direction .
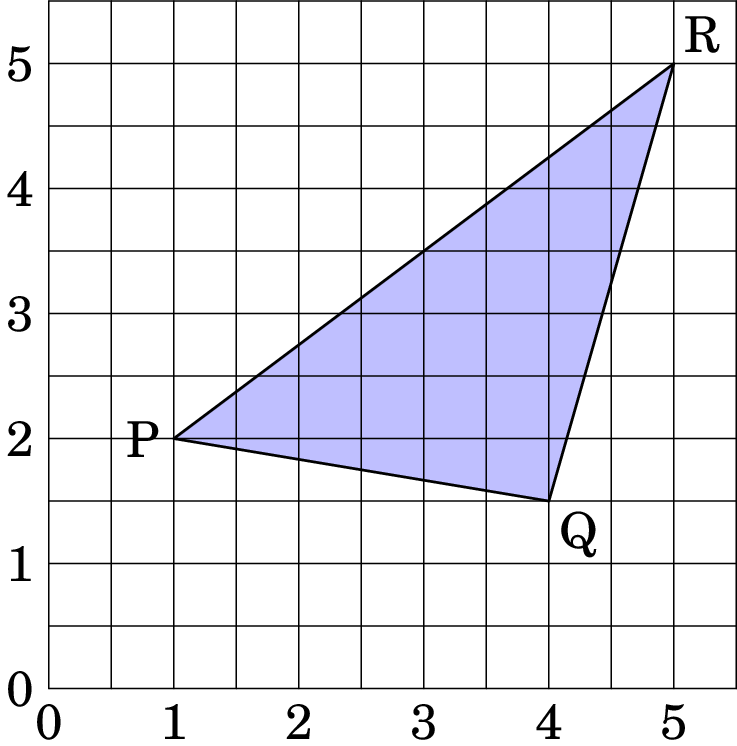
Example 2.2
Find the area of the triangle PQR and the distance from point P to the
side QR.
Solution: The two vectors and
on the sides of the triangle form a parallelogram
whose area is twice the area of the triangle. Therefore, the area of
the triangle is equal to one-half of the magnitude of the cross
product between and . The
components of those vectors can be read directly from the figure,
leading to the following result:
The distance from P to the side QR is the height of the triangle, when
QR is considered its base. Thus, that distance is equal to twice the
area of the triangle, divided by the length of side QR:
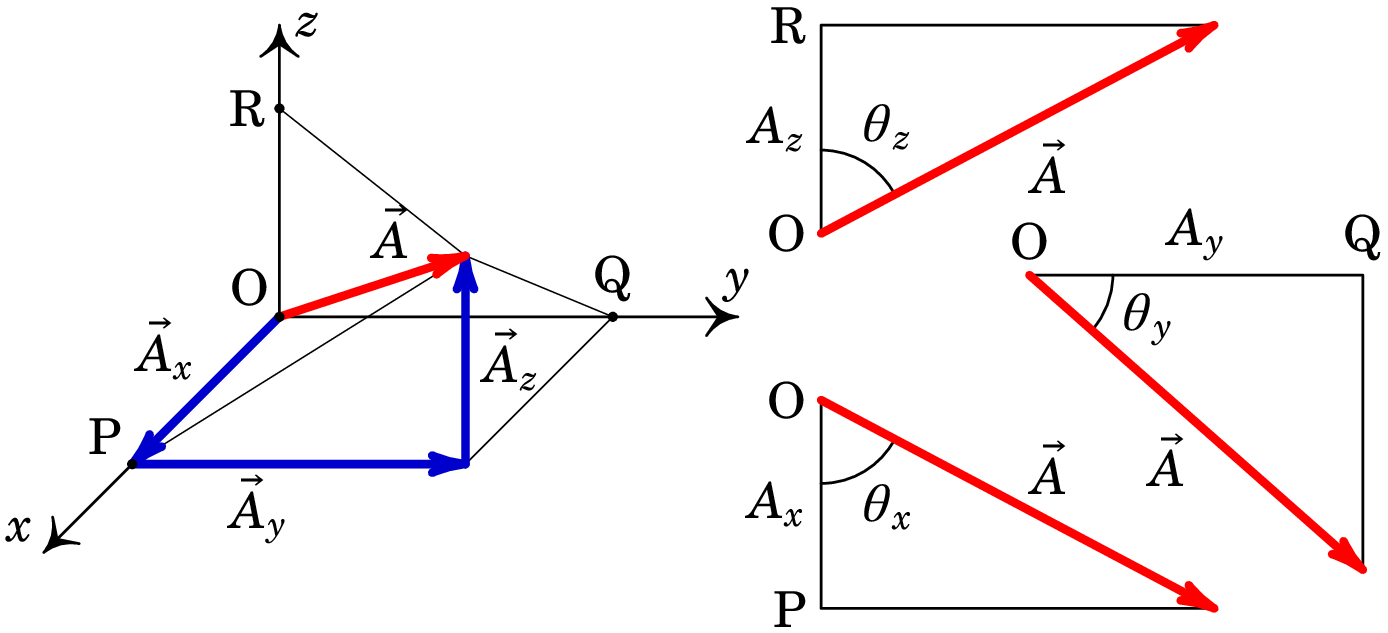
2.3 Vectors in space
A vector in space can be written as the sum of three
component vectors , and , in the
directions of the unit vectors , and
(figure 2.6).
Figure 2.6: Rectangular components of a vector in space.
Figure 2.6 shows the three rectangular component vectors;
the three rectangular components , and are the
projections of the vector along the , and axis and we have,
(2.14)
Where , , and ,
called director cosines, are the angles
that the vector does with each of the three axes. Notice that the
director cosines are the rectangular components of the unit vector
(2.15)
And, since its magnitude is one,
(2.16)
Namely, we only need to know two of the angles ,
and to know the direction of . It is
straightforward to generalize the expressions for the sum and products
of vectors on a plane to the case of vectors in space:
(2.17)
(2.18)
(2.19)
(2.20)
2.4 Position
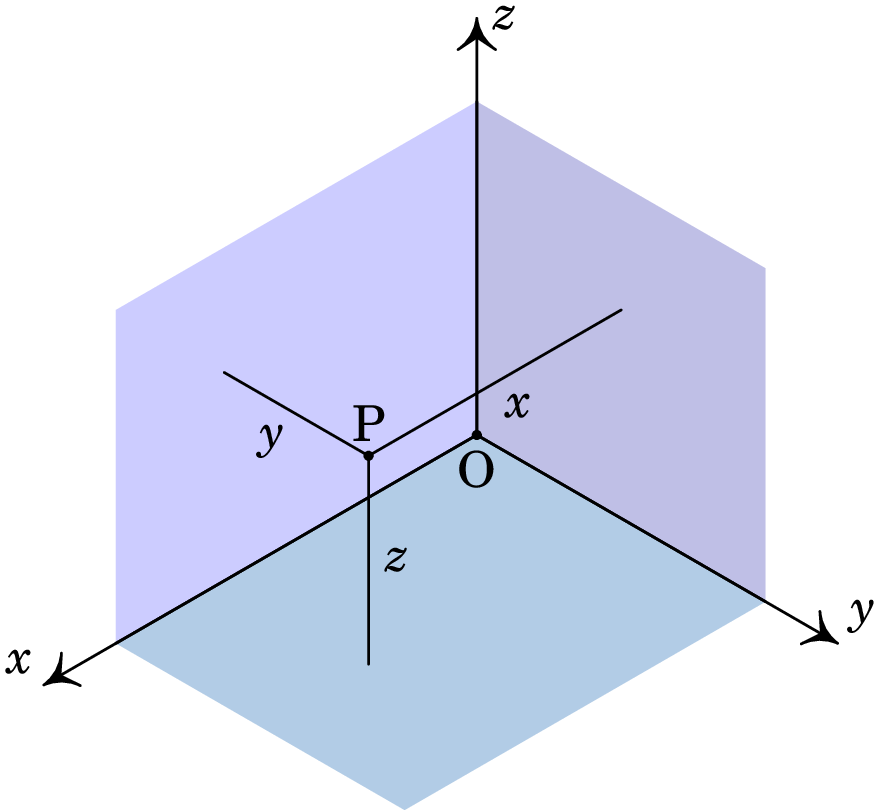
The position of a point P in space can also be given as three
coordinates (, , ), which are the distances from the point to
the three planes , , and , as shown in figure 2.7. One can
think of those three planes as two walls and the floor in a room.
Figure 2.7: Position of a point in space.
There is a difference between the rectangular coordinates (, ,
) of a point, and the rectangular components (, ,
) of a vector. The coordinates depend on the position of the
origin (O in Figure 2.7); a different choice of origin gives different
coordinates for the same point. On the other hand, the rectangular
components of a vector depend on the directions chosen for the three
axes, but not on the position of the origin.
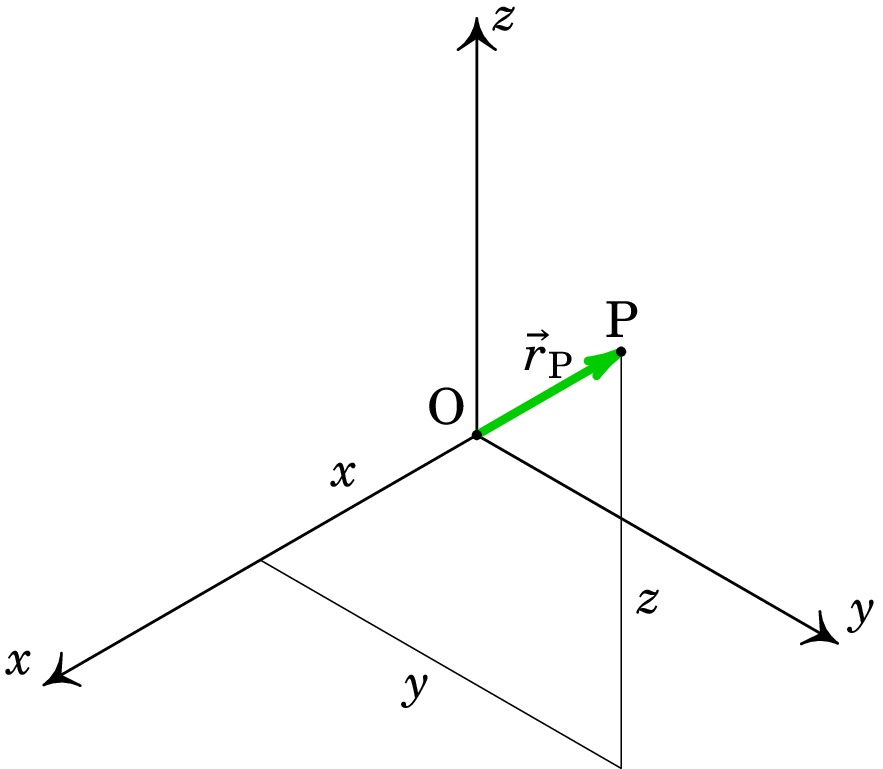
The position of a point with coordinates (, , ) can also be
represented by a vector ,
called position vector, defined as:
(2.21)
Figure 2.8 shows the position vector of point P, which is a vector
from the origin O to point P. We have used a lowercase letter and a
different color for the position vector because it is not a real
vector. For instance, the product of a scalar by a position vector or
the sum of two position vectors has no physical meaning because it
depends on the choice of the origin.
Figure 2.8: Position vector of a point P.
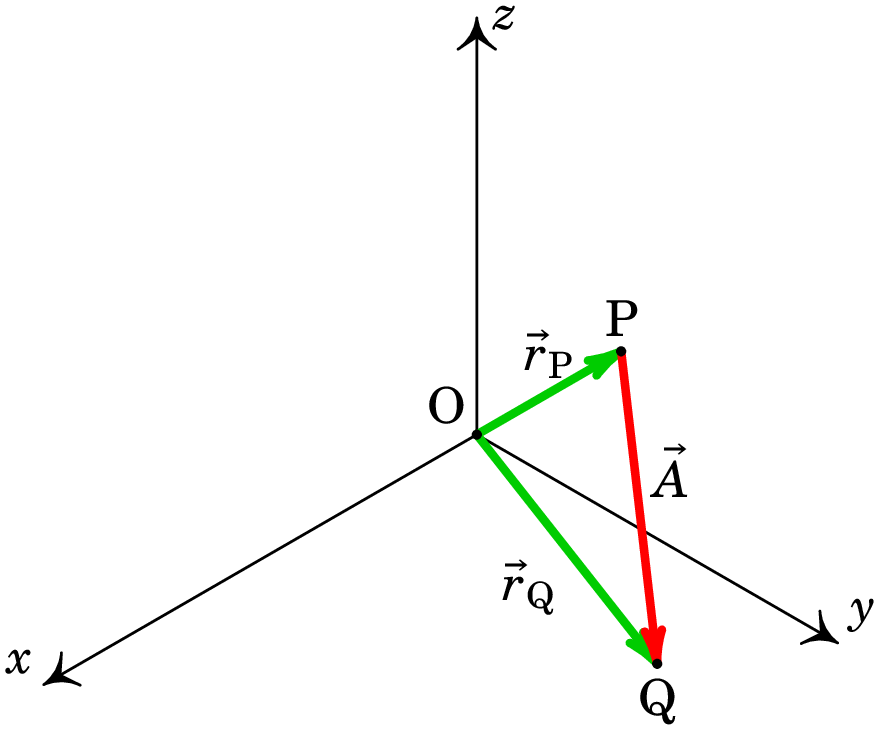
However, the subtraction of two position vectors does have a physical
meaning, which is the displacement vector from one point to another
(figure 2.9), independent of the choice of the origin.
Figure 2.9: Position vectors of two points and displacement
between them.
The displacement from point P to point Q is equal to the
position vector of Q minus the position vector o P:
(2.22)
Which can also be written as , showing that a position vector plus a
displacement vector leads to another position vector. Another meaningful
operation among position vectors is a weighted sum of position
vectors, with the sum of all weights equal to one:
(2.23)
Which is a valid position vector. If the constants are all
positive, is the position of the center of mass of a system
of particles of masses , in the positions , and
is the mass divided by the total mass. Another important case is
when the vectors are on a plane and all constants
are equal; in that case, equation (2.23) gives the position of the
centroid of the polygon with vertices in .
Example 2.3
The three vertices of a triangle have the following rectangular
coordinates:
Find: (a) The lengths of its sides. (b) The 3
angles. (c) The area of the triangle. (d) A unit
vector perpendicular to the triangle.
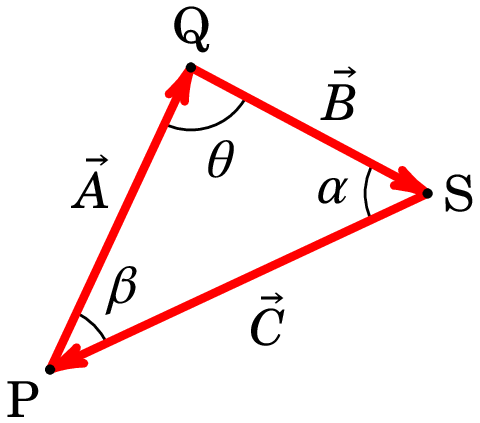
Solution: We can define the sides and the angles as in the
following figure:
The position vectors of points P, Q, and A are,
And vectors , and are then,
Before proceeding, notice that is
equal to , as it should be.
(a) The sides of the triangle are the magnitudes of the three
vectors:
(b) The cosine of each angle is equal to the scalar product
of the two vectors on the sides of the angle, divided by their
magnitudes. Notice that we must invert the direction of some of the
vectors to get the right angle:
And the inverse cosines give the three angles ,
and (the results with three
decimal digits were 127.335, 36.839, and 15.826, which we rounded to 1
decimal digit as shown, to ensure that their sum is 180°).
(c) The area of the triangle could be found with two sides
and the angle between them or from the cross product of two of the
vectors on the sides, for instance,
And the area is half of the magnitude of that vector:
(d) The vector , which we computed
above, is perpendicular to the triangle. To get a perpendicular unit
vector, we divide by its magnitude,
, and the result is:
Problems
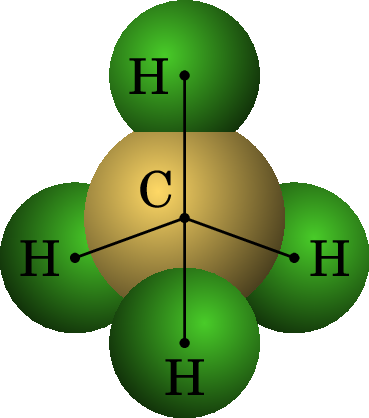
A methane molecule () is composed of a carbon atom
bound to 4 hydrogen atoms. The hydrogen atoms arrange themselves so
that they are as far apart as possible in a symmetric arrangement, as
shown in the following figure.
Prove that if the carbon atom is placed at the origin, the four
hydrogen atoms could be placed in the directions:
.
Knowing that the distance between the carbon atom and any of the
hydrogen atoms is 108.70 pm, find the distance between any two
hydrogen atoms.
Find the angle between any two carbon-hydrogen bonds.
(b) 177.5 pm. (c) 109.47°.
(a) Show that the angle between any two of the 4 vectors given
is the same, by showing that they all have the same magnitude and
their dot product gives the same value. (b) Divide two of the
vectors given by their magnitude to find unit vectors in their
direction; multiply them by 108.70 pm to obtain two vectors from the
carbon atom to two hydrogen atoms; subtract those two vectors and the
magnitude of the result will give the distance between those two
hydrogen atoms. (c) The angle is the inverse cosine of the dot
product of two of the vectors given, divided by their magnitudes.
A missile is following a straight-line trajectory. It is initially detected
in a radar station at position
(distances in km), and sometime later it is observed at
.
Prove that the missile is approaching the radar station.
Find the closest distance from the radar station that the missile will
reach if it continues in its straight-line trajectory.
(b) 3 m.
(a) Show that the magnitude of the second position vector is
smaller than the magnitude of the first position vector, which shows
that the missile is approaching the radar. (b) The difference
of the two position vectors, divided by its magnitude gives the unit
vector in the direction of the trajectory. The closest distance is the
distance from the radar to the trajectory, which is the magnitude of
the cross product between that unit vector and either one of the
position vectors given.