You might probably be familiar with the idea that a list of 3 real
numbers (x, y, z) is a vector in space. If
that is the case, I ask you to ignore it while you read this
chapter, where vectors are introduced as geometrical objects
independent of any system of coordinates. Using the geometrical
properties of vectors, without reference to any system of coordinates,
will let you gain more insight into their physical meaning. After
studying vectors from a geometrical point of view, we will introduce
coordinate systems in the next chapter and we will make extensive use
of vector components in later chapters.
1.1. Vectors and scalars
Physical quantities whose magnitude is given by a real value are
called scalars. Examples of scalar
quantities are time, temperature and pressure. Each scalar has units
and if the units of two different scalars are compatible, they can be
combined with the same rules as for real numbers: for example, we can
add a mass, in kg, with other masses also in kg; we can divide a
distance in km by a time in hours, to give a speed in km/h, and so on.
In contrast to scalars, a vector is a
physical quantity that in addition to
its magnitude also has
a direction. The magnitude of the vector
is sometimes also called the norm or module. A typical example of a vector
is a force; the magnitude of a force is measured in units of force,
i. e. newton (N) in the international system of units. The direction
of the force is the direction in which it is exerted. We will denote
vectors by letters with an arrow over them, for instance, a force
, and their magnitude by enclosing the symbol inside vertical
bars: . In cases when cannot be confused with other
scalar quantities, we will write the magnitude of as
. The magnitude of a vector is a scalar.
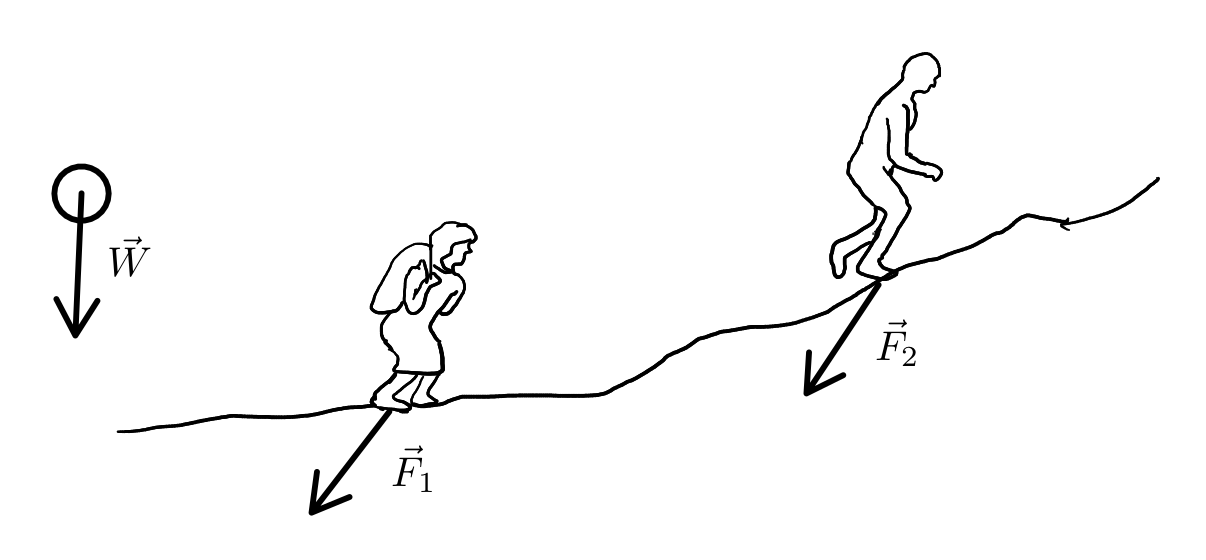
Figure 1.1 shows three forces; the weight of a 10 kg
sphere, which has a magnitude of 98 N and points downward in the
vertical, and the forces and exerted by one
the feet of a woman and a man on the ground.
Figure 1.1: Three examples of forces: the weight of an object
and the forces exerted by two persons on the ground.
Two vectors are considered equal if their magnitude and direction are
the same. In the example in Figure 1.1, the two forces and
might be equal if they have the same magnitude and
direction.
1.2 Addition of vectors
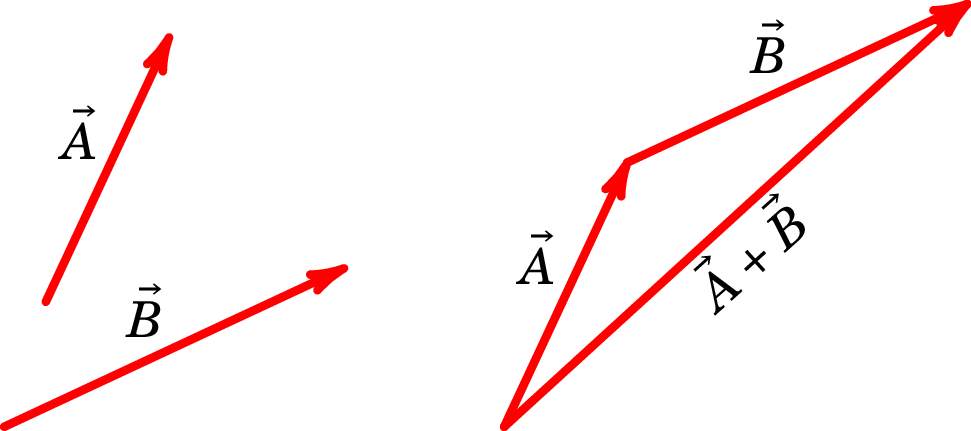
The sum of two vectors is defined as another vector which can be
obtained by placing one of the vectors after the other and then
joining the initial point of the first vector with the final point of
the second one. The right-hand side of Figure 1.2 shows the sum
of two vectors and , which was
obtained by displacing until its initial point is at the
final point of .
Figure 1.2: Addition of two vectors and .
In the case of forces, the vector sum of two forces gives a force that
produces the same effect as the two forces combined.
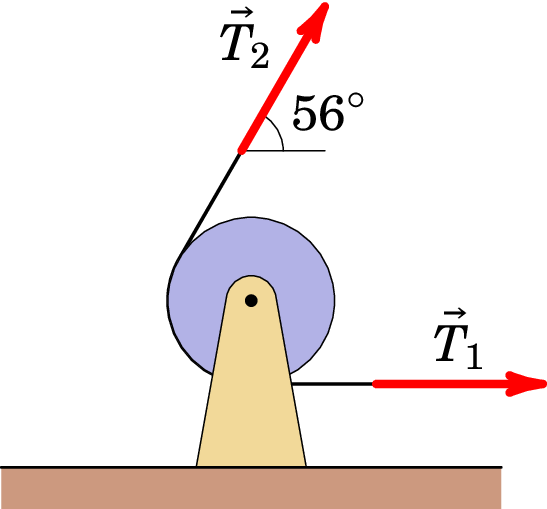
Example 1.1
Two forces are applied on the two sides of a string that passes through
a pulley, as shown in the figure.
If the friction on the pulley's axle is negligible, the magnitude of
the forces on both sides of the string are equal (and is called the
tension on the string) and in this case, it was measured to be 400
N. Find the total force exerted by the string on the pulley.
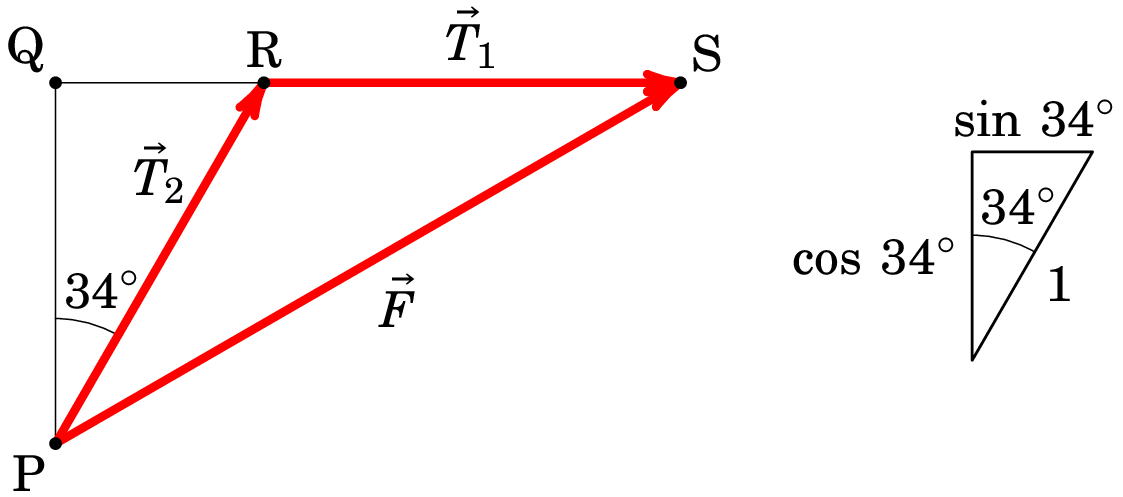
Solution: The following figure shows the sum of the
two forces, obtained by placing after . We know
that the distances PR and RS are both 400 (in units of N), PR makes an
angle of 34° with the vertical, and RS is horizontal.
The right-hand side of the figure above shows a copy of the triangle
PQR reduced by a factor of 400. Since the hypotenuse of that smaller
right-angled triangle is 1, the other two sides are sin 34° and cos
34°. Enlarging the small triangle by 400, we thus obtain the lengths
PQ and QR:
and the distance QS is then . The
magnitude of the total force is the hypotenuse of the triangle PQS
which is obtained from the Pythagorean theorem:
It is easy to see that the direction of the total force will
have to be 28° above the horizontal, since it has to make the same
angle with the directions of and , because they
both have the same magnitude. If you are not convinced you can compute
the angle RSP.
The addition of vectors has the following four important properties:
Commutative law:
Associative law:
Existence of a vector zero:
Existence of negatives:
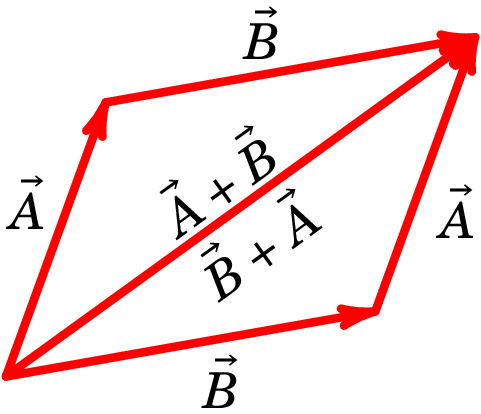
The commutative law can be proven by completing a parallelogram with
the two vectors and as shown in Figure 1.3. The
sum of the vectors is the diagonal of the parallelogram, which is
obtained by either placing after or by placing
after .
Figure 1.3: Proof of the commutative law of vector addition by
means of the parallelogram rule.
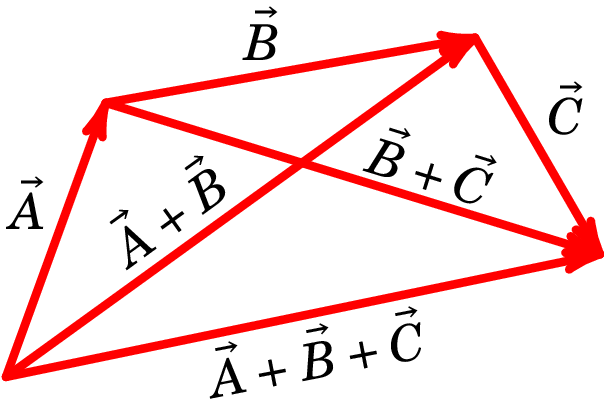
The proof of the associative law is given in Figure 1.4, which shows
three vectors , and , together with the
sums and . The sum of the three
vectors can then be simply written as
without any need for parentheses. Regarding Figure 1.4, notice that
even though the vectors seem to be on the same plane, they don't have
to; in fact, , and could even be along
three of the edges of a tetrahedron.
Figure 1.4: Proof of the associative law of vector addition.
The vector zero, , is the only
vector that when added to any vector will not change that
vector. It is unique and it has a magnitude equal to zero; it is also
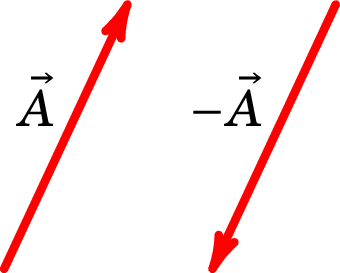
the only vector that has no direction. For any vector there
is always a unique vector, called
its negative, such that when added to
the result will be the vector zero. The negative of
is denoted and it is easy to see that it must be
a vector with the same magnitude , but in the opposite
direction to (see Figure 1.5).
Figure 1.5: Negative of a vector.
In the case of forces, the uniqueness of the negative means that the
only way to cancel the effect of a force is by adding another force
with the same magnitude but opposite direction.
The subtraction of two vectors can be defined as the sum of the first
vector and the negative of the second one:
(1.1)
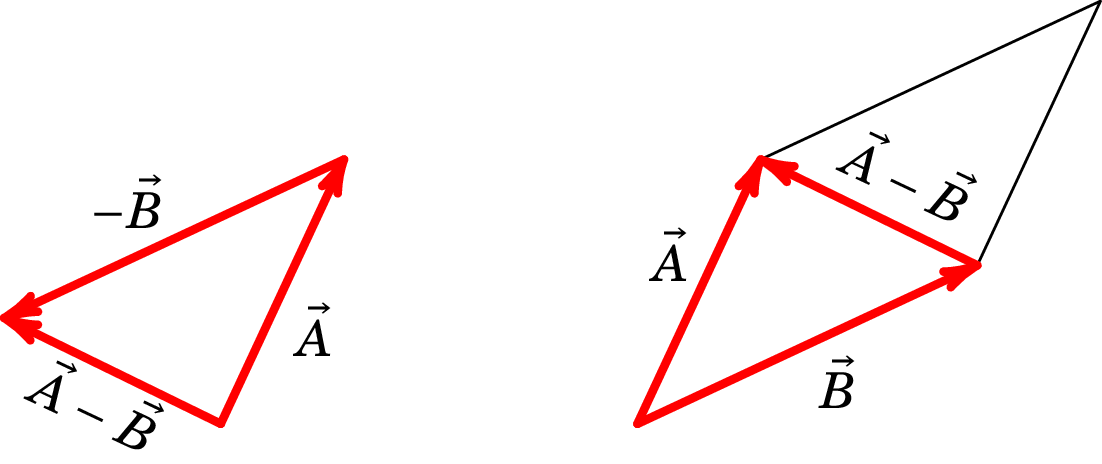
Thus, can be obtained by placing at the
final point of , as in the left-hand side of Figure 1.6. The
right-hand side of Figure 1.6 shows that can also be
obtained as one of the diagonals of the parallelogram obtained with
and . As we saw before, the diagonal that begins
from the common point of the two vectors is ; the
other diagonal, from the endpoint of to the endpoint of
, is .
Figure 1.6: Subtraction of two vectors.
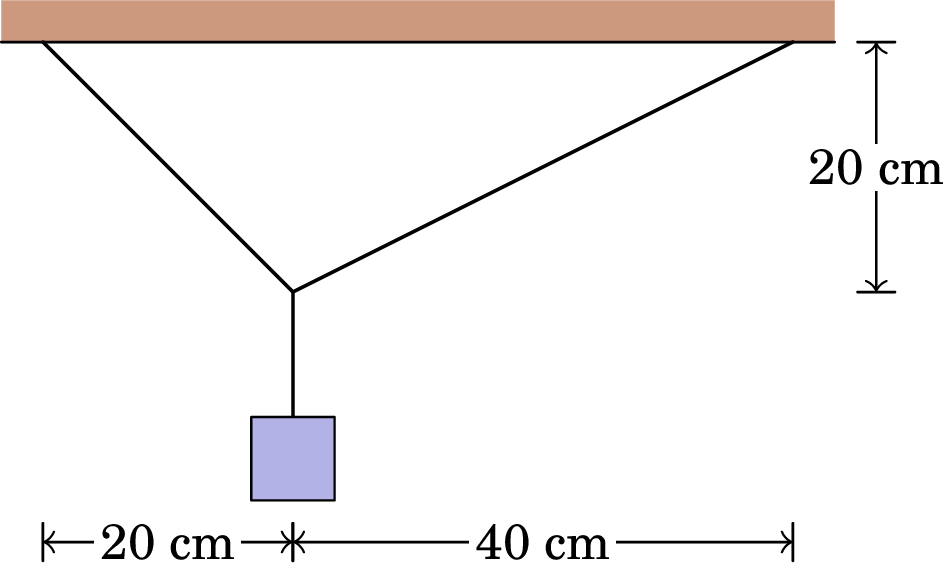
Example 1.2
A box weighing 50 N is hung from the ceiling by two strings, as
shown in the figure. Find the forces in the two strings.
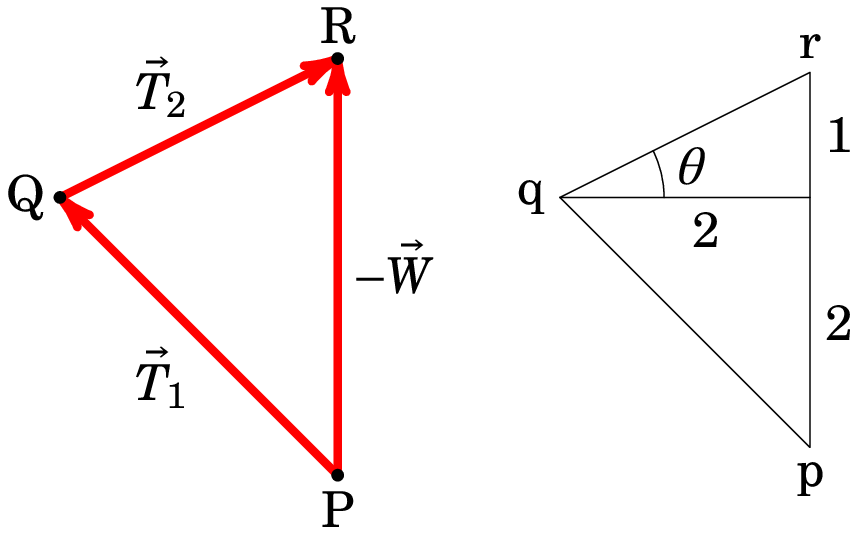
Solution: Since the block remains at rest, its weight must be
canceled by the sum of the forces in the two strings. Thus, if
and are the forces exerted by the two strings
and is the weight of the box, we have:
The left-hand side of the following image shows those three forces and
the right-hand side shows a smaller triangle, pqr, similar to the
forces triangle PQR.
The sides pq and qr are reduced copies of the two strings on the left
and the right. The side qr was given the length of the string on the
right divided by 20 cm, to make the triangle simpler; thus qr moves 2
units to the right and 1 unit up. Since qp must also move 2 units to
the right, qp must be the string on the left divided by 10 cm and p is
2 units below q. Hence, pr is 3 units and the lengths of the
other two sides can be computed with the Pythagorean theorem:
Since N, and can be obtained by
multiplying pq and qr by 50/3 N:
and the directions of and are pointing upwards
along the two strings.
1.3 Scalar multiplication
When we add a vector with itself times, the result is a
vector in the same direction of but with magnitude
times bigger and we write the result as . If is a
negative integer, we interpret as summing times the
negative of the vector, , thus leading to a vector in the
opposite direction of and with magnitude times bigger
than the magnitude of .
The generalization to any scalar is that the product
gives a vector with magnitude , in the same
direction of , when is positive, or in the opposite
direction when is negative. When , the product
gives the vector zero, .
The following table shows the important properties of the product of
scalars with vectors.
Unit multiplication:
Associative law:
Distributive law (vector addition):
Distributive law (scalar addition):
We can also divide a vector by a scalar, as in , which
means that we are multiplying vector by . In the case
of the weight of an object of mass , the weight divided
by the mass,
is always the same vector , independently of the mass of the
object, which is the acceleration of
gravity. It has a magnitude of approximately 9.8 m/s², in the
vertical direction and pointing down. This is simply a consequence of
Newton's second law, which states that a force acting on an
object of mass produces an acceleration given by the
relation:
(1.2)
The weight is the force produced by the gravitational
attraction of Earth on an object and is the acceleration it
produces near the surface of the Earth. A word of caution: even though
we can write equation (1.2) as , don't even think
of writing it as ; a vector cannot be divided by
another vector to give a scalar! If we were given two vectors
and and were asked to find the value of in
equation (1.2), we should first make sure that the problem has a solution,
by checking that the two vectors have the same direction; having done
that, we would then proceed to say that the magnitude of the vectors
in both sides of equation (1.2) must be equal and therefore,
where we are dividing two scalars, and not two vectors. Another
important point about scalar multiplication is that it is not just the
product of a number by a vector, as in
. For instance, the product
in equation (1.2) changes a vector , in the space of
accelerations, into a vector in a different vector space, the space of
forces.
1.4 Dot product
The dot product between two vectors
and , denoted by , gives a
scalar, equal to the product of the magnitudes of the
vectors times the cosine of the angle between their directions:
(1.3)
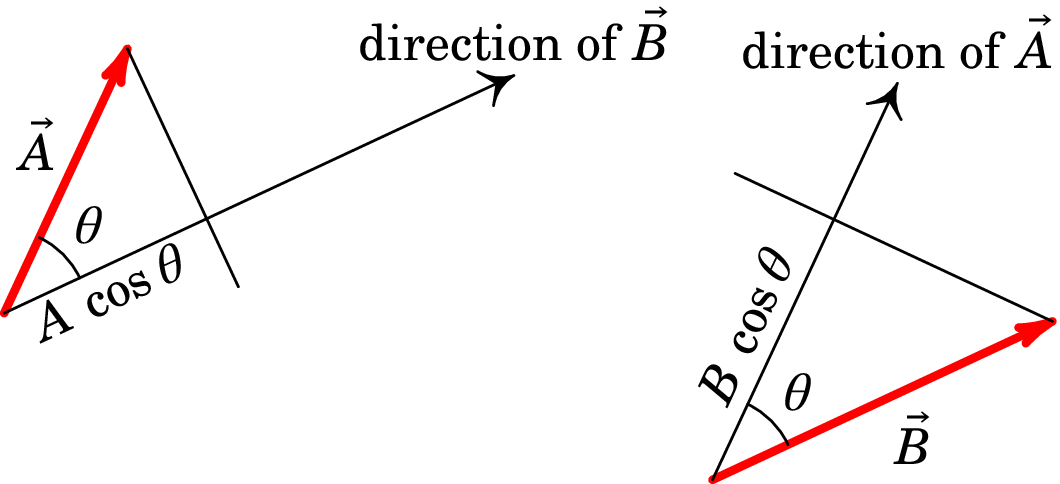
Figure 1.7 shows two vectors and and the angle
between their directions. The projection of in the
direction of is equal to ; notice that it can
be negative when , namely when that projection
points in the opposite direction of . The projection of
in the direction of is . Therefore,
the dot product is also equal to the projection
of one of the vectors along the direction of the other, times the
magnitude of that other vector. The dot product is also referred to
as a scalar product.
Figure 1.7: Projections of two vectors along the direction of
the other.
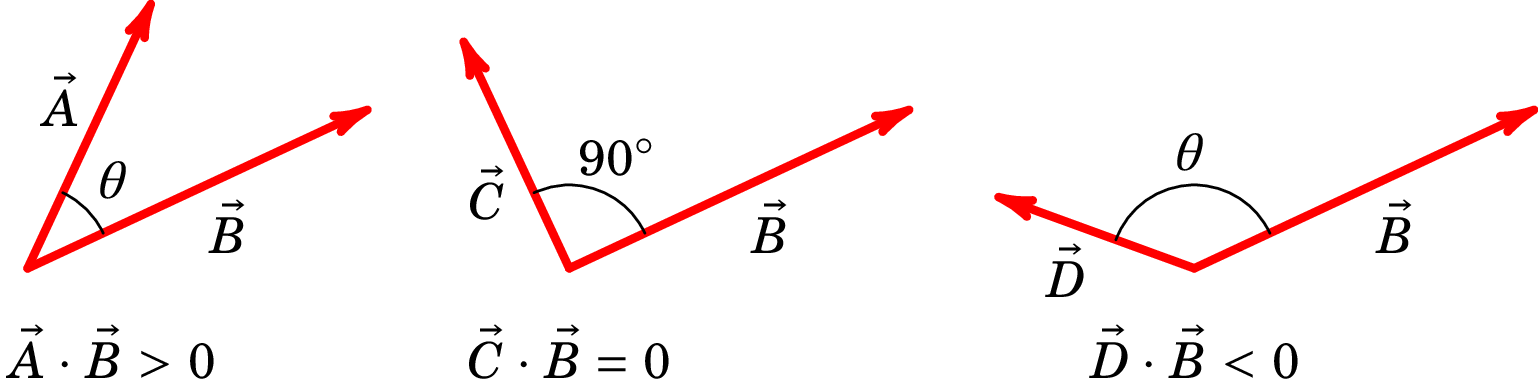
Since the angle between two vectors is within 0 and
radians, the cosine of that angle can be within ─1 and 1, so the
dot product will be within and
. It will be positive if is an acute angle (less than
), negative if that angle is obtuse (greater than ) and
zero when the two vectors are perpendicular (see
Figure 1.8).
Figure 1.8: Sign of the dot product according to the angle
between the vectors.
If two vectors and have the same direction, then
, while if they have opposite directions
then and if they are perpendicular,
.
The dot product has the following properties:
Possible values:
Commutative law:
Distribute law:
Scalar associativity:
Positiveness:
Example 1.3
Prove the law of cosines for a triangle.
Solution: Let us consider a triangle with sides , and
and an angle between the sides of lengths and . We
can define three vectors , and along the
triangle sides, as in the following figure:
We then have and applying the properties of
the dot product, the square of the magnitude of is,
Which leads to the law of cosines:
(1.4)
With the law of cosines, we don't have to try to arrange right-angled
triangles to apply the Pythagorean theorem, as we did in the solution
of example 1.1. We could have applied the law of cosines directly to
triangle PRS, where the angle PRS is 124°, to obtain immediately:
1.5 Cross product
The cross produt between two vectors and is
defined as another vector , denoted as,
(1.5)
with magnitude equal to the product of the magnitudes of the two
vectors, times the sine of the angle between their directions:
(1.6)
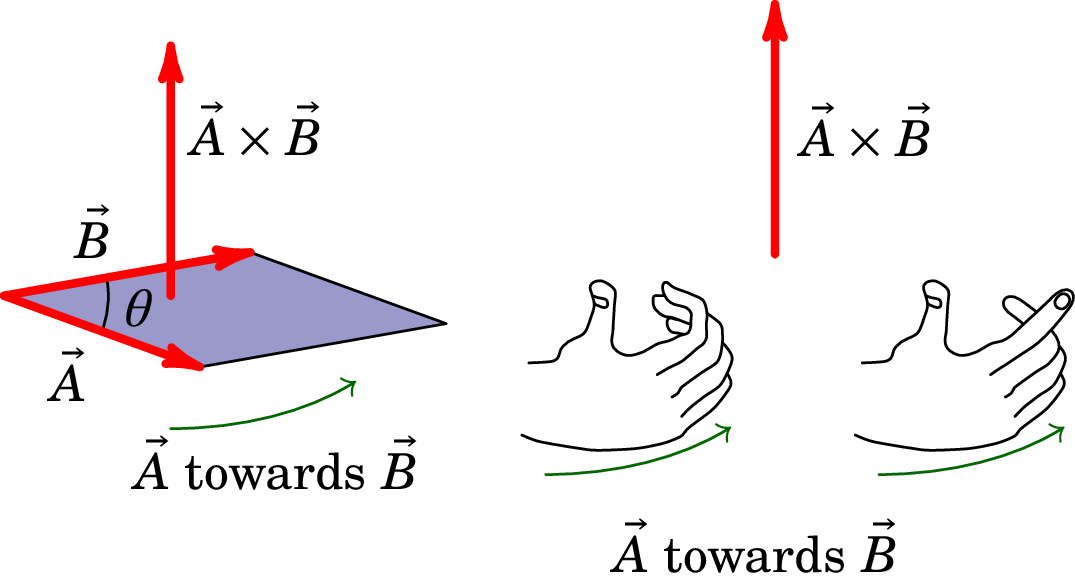
The direction of is, by definition,
perpendicular to both vectors and and following
the right-hand rule: if you point the
four fingers of your right hand (excluding the thumb) in the direction
of vector , in such way that they can turn towards the
direction of vector , your thumb will then point in the
direction of , as shown in Figure 1.9. Notice
that any two vectors for which is different from zero
will always define a plane, and will be
perpendicular to that plane. Furthermore, equation (1.6) implies that
the magnitude is the area of the
parallelogram generated by vectors and (shaded
area in the figure).
Figure 1.9: Cross product between two vectors and right-hand rule.
Some important properties of the cross product are the following:
Anti-commutative law:
No associative law:
Distributive law:
Scalar associativity:
Null result:
Example 1.4
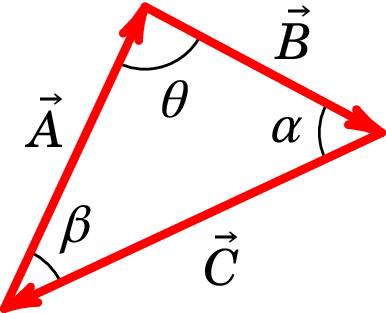
Prove the law of sines for a triangle.
Solution: For a triangle with sides , and and angles
, and , let us define vectors , and as in
the following figure:
We then have,
multiplying, with cross product, each term of that equation by
and using properties of the cross product we get,
If instead of multiplying by we now multiply by we
get,
Dividing the last two equations above by , we arrive at the
law of sines:
(1.7)
Problems
Proof that the diagonals of a rhombus are perpendicular. If the sides of the rhombus are vectors
and , the two diagonals will be
and and they will be perpendicular if their dot
product is equal to zero.
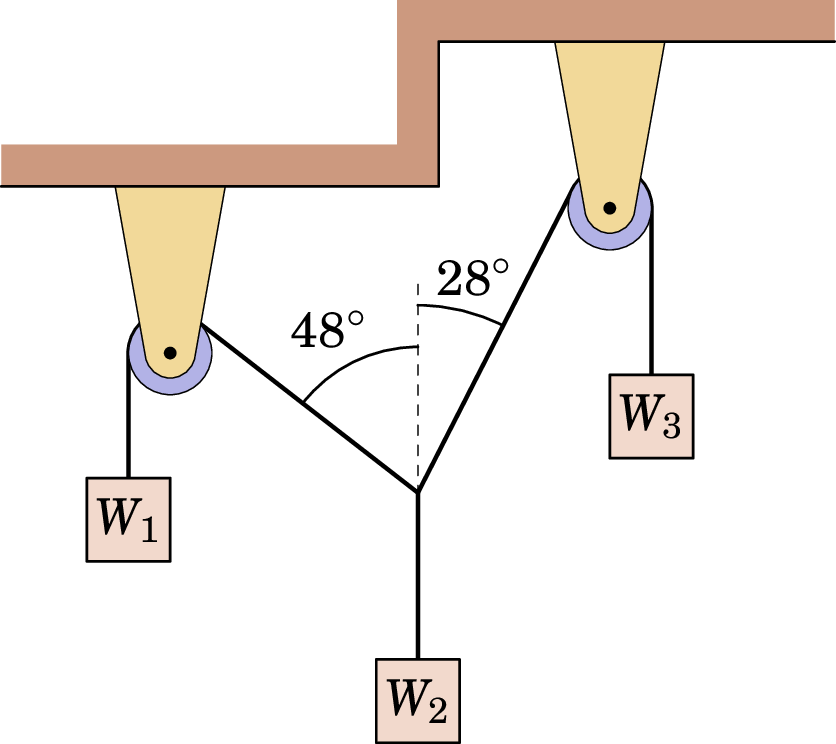
Knowing that the three boxes remain at rest and the weight in the figure is 64 N, compute the
weights and .
N and N.The tension on each string is equal to the
weight of the box attached to it. Then notice that the forces on the
strings form a triangle with angles of 28°, 48° and 104°; knowing that
the tension in the string attached to has module 64 N, use the law
of sines to find the tensions on the other two strings.
Proof the following identities:
On the right-hand side, simplify
and
and you
should get just .
On the left-hand side, notice that
and
and use the identity
to obtain the result on the
right.