e os valores próprios da matriz da aproximação linear, na vizinhança
do primeiro ponto de equilíbrio, (0, 0), são,
(%i4) eigenvalues (subst (p[1], J));
(%o4)
Ou seja, o ponto de equilíbrio em (0, 0) é ponto de sela. Os valores
próprios da matriz da aproximação linear, na vizinhança do segundo
ponto de equilíbrio, (3, 2), são:
(%i5) eigenvalues (subst (p[2],J));
(%o5)
E, por serem números imaginários puros, o segundo ponto de equilíbrio
é um centro.
O retrato de fase, na região relevante onde as duas populações
e
são positivas ou nulas, constrói-se com o seguinte comando:
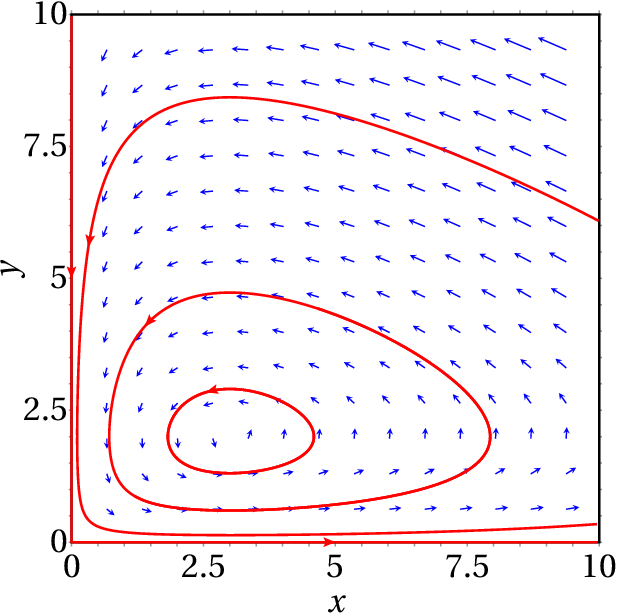
(%i6) plotdf (u, [x,y], [x,0,10], [y,0,10]);
O estado limite é um ciclo, em que as populações das duas espécies
oscilam, sem que nenhuma das duas seja nunca extinta.
Problema 4
Considere o modelo de Verhulst para duas populações:
diga se é um sistema com competição ou um sistema predador presa (e
nesse caso quais as presas e quais os predadores). Analise a
estabilidade e trace o retrato de fase.
O termo
na expressão de
implica que a população
faz diminuir a população
. E o termo
na expressão de
implica que a população
faz aumentar a população
. Como tal, trata-se de um sistema predador presa, onde
são as
presas e
os predadores.
As componentes da velocidade de fase são:
(%i1) u: [x*(1-x-2*y), y*(1+5*x-y)]$
e os pontos de equilíbrio são os pontos onde as duas componentes da
velocidade de fase são nulas:
(%i2) p: solve (u);
(%o2)
Como só interessam os valores positivos das variáveis de estado, o
sistema tem então 3 pontos de equilíbrio, nos pontos (0, 0), (1, 0) e
(0, 1) do espaço de fase (
,
).
A matriz jacobiana do sistema é:
(%i3) J: jacobian (u, [x,y])$
As matrizes das aproximações lineares nas vizinhanças dos 3 pontos de
equilíbrio são então:
(%i4) makelist (subst (p[i], J), i, 1, 3);
(%o4)
A primeira matriz é diagonal e com um único valor próprio, igual a
1. Como tal, o primeiro ponto de equilíbrio, na origem do espaço de
fase, é um nó próprio repulsivo.
Os valores próprios nos outros dois pontos de equilíbrio são os
seguintes:
(%i5) makelist( eigenvalues (subst (p[i], J))[1], i, 2, 3);
(%o5)
Ou seja, o segundo ponto de equilíbrio, (1, 0), é ponto de sela e
terceiro ponto de equilíbrio, (0, 1), é um nó impróprio atrativo.
O retrato de fase, na região relevante onde as duas populações
e
são positivas ou nulas, constrói-se com o seguinte comando:
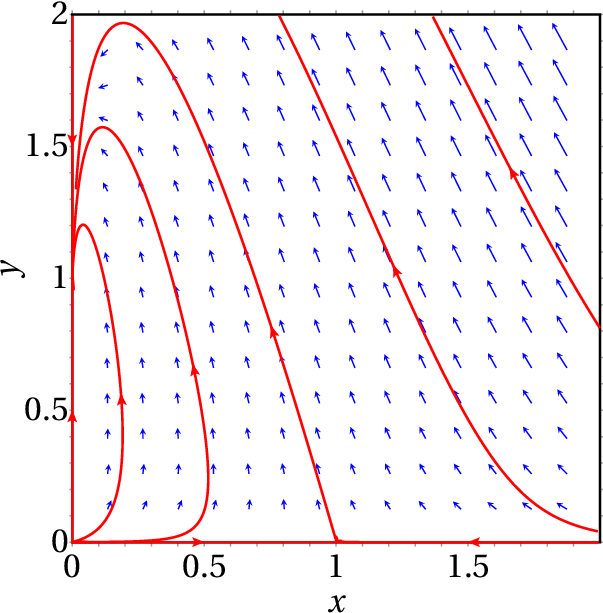
(%i6) plotdf (u, [x,y], [x,0,2], [y,0,2]);
Se inicialmente existem predadores (
maior que zero), o sistema
evolui sempre até extinguirem-se todas as presas, ficando a população
de predadores igual a uma unidade.
Problema 6
O sistema dinâmico:
tem um ponto de equilíbrio na origem. Encontre as equações de evolução em
coordenadas polares, nomeadamente, as expressões para
e
em função de
e
. Explique que tipo de ponto de
equilíbrio é a origem e quantos ciclos limite existem.
As derivadas das expressões
e
são:
Substituindo nas equações de evolução, obtém-se as equações de
evolução em coordenadas polares:
que são duas equações lineares para
e
. Aplicando qualquer método de resolução de equações
lineares, obtém-se essas duas expressões. Por exemplo, o método de
eliminação; multiplicando a primeira equação por
e a
segunda por
,
e somando as duas equações obtêm-se a expressão para
Multiplicando a primeira equação de evolução por
e a
segunda por
,
e subtraindo a primeira equação da segunda obtêm-se a expressão para
Fora da origem,
é positiva e, como tal,
é sempre
positiva. Ou seja, o estado do sistema afasta-se sempre da origem (
aumenta). Enquanto o estado se afasta da origem, dá várias voltas no
sentido negativo (sentido dos ponteiros do relógio), porque
é igual a -1. Isso implica que a origem é um foco
repulsivo e não existe nenhum ciclo limite.
As expressões para
e
também podem ser obtidas
no Maxima com os seguintes comandos:
(a) Encontre as equações de evolução em coordenadas polares
(sugestão: use o comando trigreduce
para simplificar o resultado).
(b) Trace o gráfico de
em função de
(
não
pode ser negativo), demonstre que o sistema tem um único ciclo limite
e determine se é atrativo ou repulsivo.
(c) Escreva a equação do ciclo limite, em função das
coordenadas cartesianas (
,
).
(d) Corrobore a resposta traçando o retrato de fase no plano
cartesiano (
,
).
(a) Substituem-se as coordenadas cartesianas por coordenadas
polares nas duas equações de evolução, e resolvem-se em simultâneo
para encontrar as expressões para
e
(designadas por w e v nos comandos seguintes):
As duas equações de evolução, em coordenadas polares, são então:
,
.
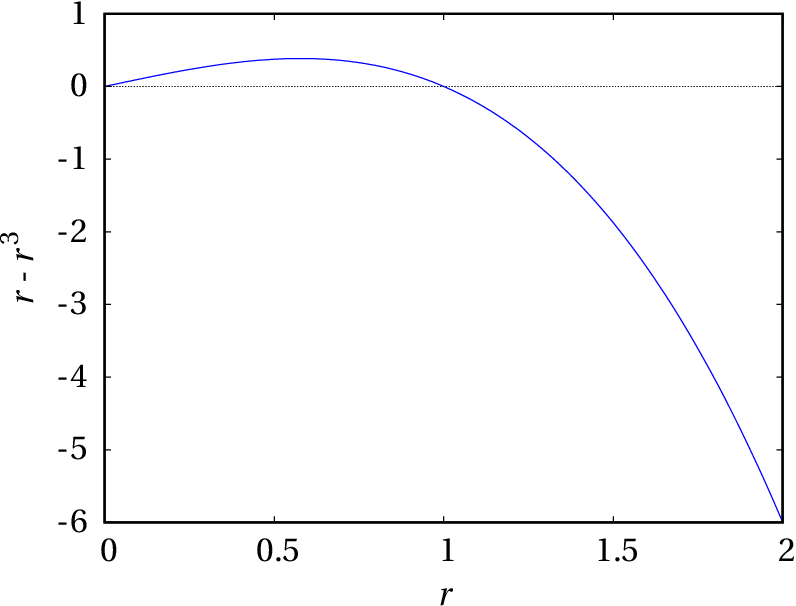
(b) O gráfico de
em função de
obtém-se com o
comando:
(%i5) plot2d (rhs(%[1][1]), [r,0,2]);
e mostra que existe uma única raiz diferente de zero, em
, e
aumenta se for menor que 1 e diminui se for maior que 1. Assim sendo,
existe um único ciclo limite, atrativo, que é uma circunferência de
raio 1.
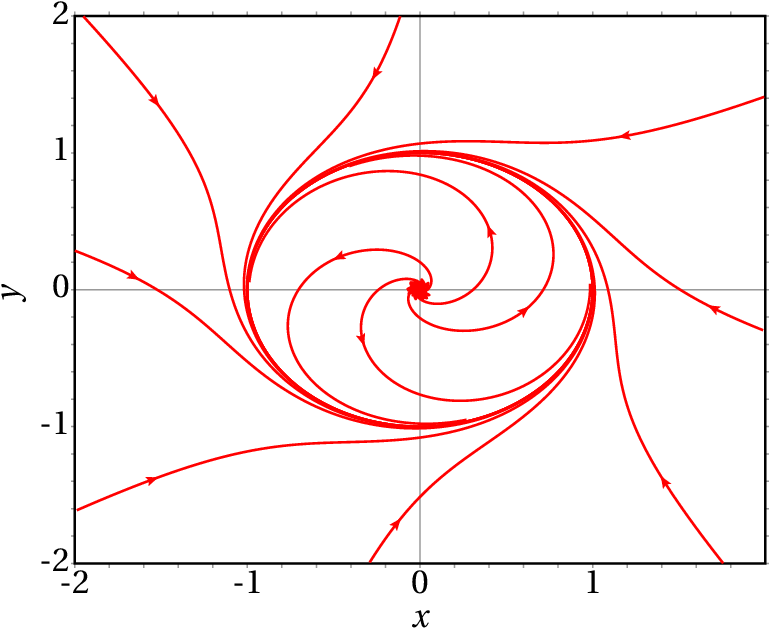
(c) O ciclo limite é a circunferência de raio 1 e centro na
origem, que em coordenadas cartesianas tem equação
(d) Para criar o retrato de fase, em coordenadas cartesianas, é
necessário eliminar primeiro a definição das coordenas polares: