When an object can move freely in space, without following
a particular path, its position can no longer be described
with one single variable as in the examples given in the
previous chapter. In the seventeenth century, the
mathematician
Gottfried Leibniz wrote that it would be useful
to create an area of mathematics that described positions
directly, in the same way that variables are used in algebra
to represent numerical values. In the same century Isaac
Newton
stated the parallelogram rule to add forces. However, the
concept of vector used today, turning the dream of Leibnitz
a reality, was only invented many years later in the
nineteenth century.
2.1. Vectors
A quantity that has the same value when measured by
different observers in different reference frames is called
a scalar. Some
of the quantities used in the previous chapter are scalars;
for example, the displacement
and the
time interval
.
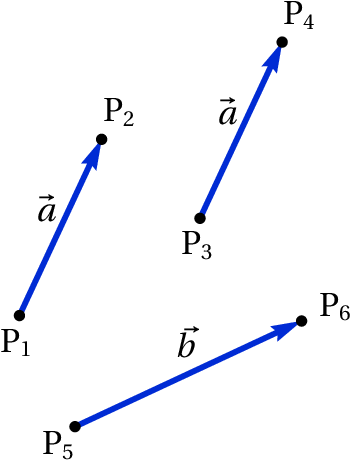
Figure 2.1: Free vectors.
Examples of physical quantities which are not scalar are
the components of the position, velocity and acceleration
along an axis. Changing the direction or origin of that
axis, the values of these quantities also change.
It is useful to write the equations of physics so that they
are equal in any reference frame and vectors can be used to achieve this
goal. A typical example is the displacement vector, which is
a directed line segment between two points P1 and
P2 in space, where the first point is considered
the initial point, or origin, of the segment and the second
point is the terminal point of the segment.
For example, in Figure 2.1,
represents the vector starting at P1
and ending at P2; the arrow in P2
indicates that it is the end point and an arrow is also used
on top of the letter used to denote the vector, to make it
clear that this is a vector and not a regular algebraic
variable.
2.1.1. Vector properties
The distance between the initial and terminal points of a
displacement vector is called its magnitude or length. In this book, if a vector is
denoted by
its magnitude is then denoted by
(the same letter without an arrow on top of it). Since the
distance between two points is a scalar, the magnitude of
a vector is a scalar too. A vector is defined by its
magnitude and its direction, which is the
orientation of the line through the two points.
Two vectors are equal if, and only if, they have the same
direction and magnitude regardless of their initial
point. For example, in
Figure 2.1 the vector between
points P1 and P2 is equal to the
vector between P3 and P4 and that is
why they were both denoted by
. The distance
between P3 and P4 equals the
distance between P1 and P2 and the
lines going through those two pairs of points are
parallel. Vector
, from point P5 to
P6, is not equal to
because its
magnitude and direction are different. This kind of
vectors in which the initial point does not matter, are
called
free vectors.
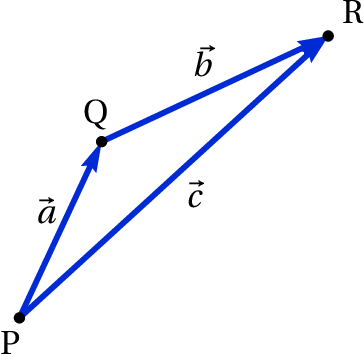
Figure 2.2: Vector addition.
In Figure 2.2, starting from
the point P the displacement vector
ends at
point Q and then from that point the displacement vector
leads to the final point R. Namely, the combined
displacements
and
are equivalent to a
displacement from point P to R, denoted in the figure by
vector
. The combined displacement
defines the sum of vectors
and
(2.1)
Therefore, the addition of two vectors is done by placing
the initial point of the second vector on the terminal
point of the first one and then joining the initial point
of the first vector with the terminal point of the second
one.
The equation
+
=
implies
that
=
−
and
Figure 2.2 shows that vector
joins the terminal point of
with the
terminal point of
, when those two vectors are
placed on the same initial point. Thus, the subtraction of
two vectors is done placing those two vectors on the same
initial point and then joining the terminal point of the
second vector to the terminal point of the first
vector.
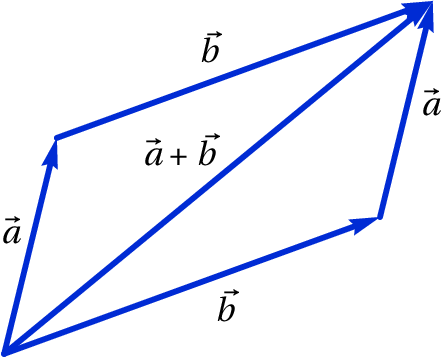
The addition of vectors is a commutative operation:
placing the initial point of vector
on the
terminal point of vector
leads to the same
combined vector obtained by placing the initial point of
vector
on the terminal point of vector
(see Figure 2.3). The sum of
vectors
and
is the
diagonal
of the parallelogram formed by placing the vectors
on a common initial point and then repeating
each vector with its initial point on the terminal point
of the other. The addition of several vectors also follows
the associative law.
Figure 2.3: Parallelogram rule for adding vectors.
According to the definition of vector addition and
subtraction, the sum of a vector with itself,
+
, is a vector with the same direction but
magnitude twice as big. Subtracting a vector from
itself,
-
, leads to the null vector (a
vector whose initial and terminal points are the
same). Generalizing these results, the product of a scalar
and a vector
, is defined as another vector
in the same direction, if
is positive, or in the
opposite direction if
is negative and with magnitude
equal to
. The product of a scalar and a vector is
usually written with the scalar first, followed by the
vector, but the order does not really matter. If
is
equal to zero, then
is the null vector
.
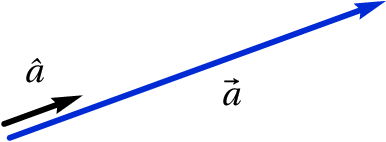
Any vector
is equal to the product of its
magnitude,
, and a unit vector
, with the same
direction of
but magnitude equal to 1 (see
Figure 2.4). Thus, the unit
vector
defines the direction of the
corresponding vector
. In this book unit vectors
are denoted by a letter with a hat, instead of an arrow,
on top of it.
Figure 2.4: Unit vector
defining
the direction of vector
.
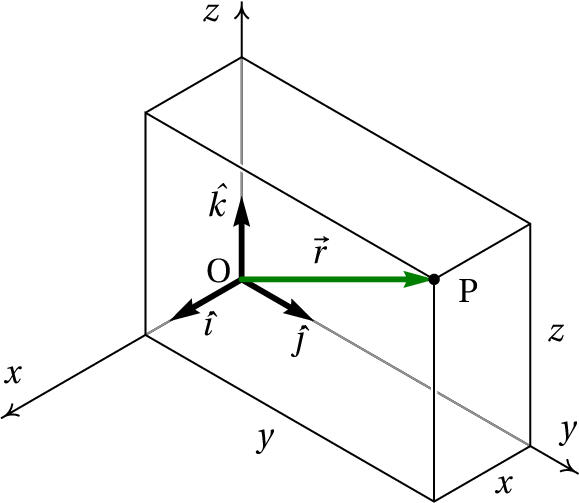
As mentioned in the previous chapter, the position of a
point P in space can be given by three coordinates in some
system of coordinates and the
rectangular coordinates
system was introduced.
Figure 2.5 shows the
rectangular coordinates (
,
,
) of point P.
Figure 2.5: Rectangular coordinates of a
point P and rectangular unit vectors.
There are two different ways to define the directions of
the three axes
,
e
. The usual way to define
those directions follows the right-hand rule: after closing
the right hand fingers into the palm, the thumb, index and
middle fingers are then opened making them form right
angles among themselves; the direction of the
axis
will then be given by the index finger, the direction of
the
axis by the middle finger and the direction of the
axis by the thumb. A rectangular coordinate system is
defined by a point O which is the origin and three
rectangular
unit vectors,
,
and
, which are perpendicular among themselves and
define the directions of the 3 axes.
Any vector can be obtained from the addition of three
vectors with directions parallel to the 3 axes,
(2.2)
where (
,
,
) and (
,
,
) are the
rectangular components of the
vectors. From the properties of the addition of vectors
and the product of a scalar and a vector it follows that
the sum of two vectors
and
can be
obtained by adding their components respectively:
(2.3)
That is, the sum of two vectors is another vector with
rectangular components equal to the sum of the original
vectors components. Note that the direction and magnitude
of a vector
are independent of the coordinate
system and origin used; however, its rectangular
components (
,
,
) are different for
different rectangular coordinates systems. If two vectors
are equal, then their rectangular components on the same
system must also be equal.
The position
vector
of a point P, with coordinates (
,
,
), is the vector
with initial point on the origin and terminal
point on P; it can be obtained adding 3 vectors along the
three axis, as shown in Figure 2.5
(2.4)
Note that the components of the position vector are equal
to the coordinates of the point P, (
,
,
). The
position vector depends on the choice of the origin of the
system; therefore, it is not a free vector, since its
initial point is always at the origin, and its magnitude
and direction are not the same in coordinates systems with
different origins.
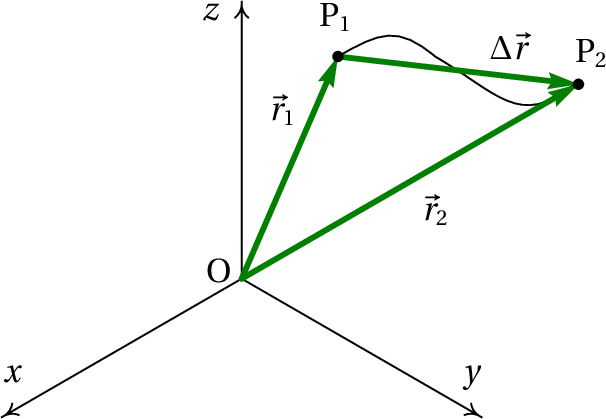
2.1.2. Velocity and acceleration vectors
The trajectory of a moving point can be determined at
every moment
by an expression for the position vector
of the point as a function of time
(2.5)
Each of the three components
,
and
is
a function of time. In a time interval
the displacement of the point (see
Figure 2.6) is equal to
(2.6)
where
and
are the position
vectors at
1 and
2.
Figure 2.6: Trajectory of a point and
displacement
between two
instants
and
.
The vector obtained by dividing the displacement
by
is the average velocity,
which has the same direction as the displacement
. The
velocity vector
at a moment
is defined as the limit of the average
velocity, when the time interval
,
approaches zero, starting at time
(2.7)
Since the rectangular components of the displacement
vector
are
,
and
, then the
velocity vector is equal to
(2.8)
Applying
equation 1.5 to
each of the three components of the position vector, the
three results can be combined into the following vector
equation
(2.9)
The increase of the velocity vector,
, in the time interval
divided by that time interval defines
the acceleration vector
(2.10)
and its rectangular components are the derivatives of the
components of the velocity vector
(2.11)
The results obtained from
equation 1.11
for each of the three components of the velocity vector
can also be combined into a single vector equation
(2.12)
Equations 2.8
and 2.11 are the kinematic
equations in 3 dimensions, written in vector form. Since
the equality of two vectors implies equality of their
components, those two equations are equivalent to
,
and similar
equations for the
and
components. Therefore, a
motion in three dimensions is always the superposition of
three one-dimensional motions along the
,
and
axis.
There is also another kinetic equation for each
rectangular component, which relates the acceleration with
the velocity and the position
(2.13)
those three equations can also be combined into a single
vector equation:
, where the dot
"·" denotes scalar product among vectors,
which will be introduced in the next section. However, in
order to solve differential equations using the method of
separation of variables used in the previous chapter, it
will be more useful to solve each of the three
equations 2.13 separately.
The speed
mentioned in the previous chapter is the
magnitude of the velocity vector
;
is the
component of the velocity along the trajectory, which can
be either positive or negative. When vectors are used to
describe the motion,
and
are simply
called velocity and acceleration.
Example 2.1
the velocity of a particle as a function of time is
given by the expression (in SI units):
The position of the particle at
= 0 is
(2
+
5
). Find the position vector, the
velocity and the acceleration at
= 15 s and as
approaches infinity. Make the plot of the particle's
trajectory during the first 60 seconds.
Solution. The components of the velocity can be saved
into a list in Maxima
(%i1)v: [5-t^2*exp(-t/5), 3-exp(-t/12)];
(%o1)
And functions diff and
integrate can be
used to differentiate and integrate that list, in order to
find the components of the acceleration and the
position. The two components of the acceleration
(derivative of the velocity with respect to time) are
found in the following way
(%i2)a: diff (v, t);
(%o2)
The components of the position vector are obtained using
Equation 2.9.
the command assume
was used to tell Maxima that
is positive; if that
command had not been given, Maxima would have asked about
the sign of
before computing the integral, since the
result depends on that sign.
The position, velocity and acceleration after 15 seconds are
then
That means that the particle attains a constant velocity
, moving away to
infinity.
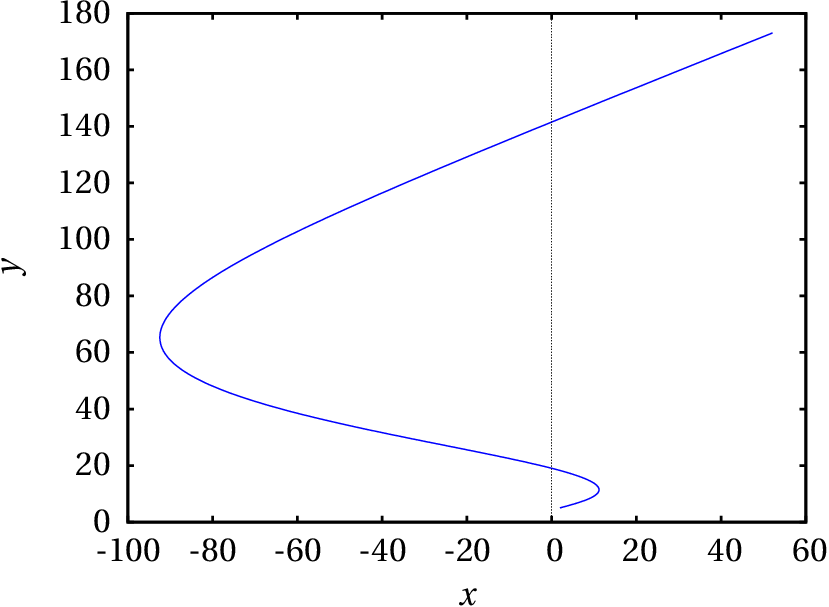
To create the plot of the trajectory, the option
parametric of
Maxima's function plot2d
is used. The
and
components of the position vector
must be given separately, and not in a list, because that is
the form expected by plot2d.
The first element in list r
(
component of the position) is obtained with the syntax
r [1]
and the second element (
component) with
r[2]
The time interval from 0 to 60 was given using the
notation [t, 0, 60].
The result is shown in Figure 2.7.
Figure 2.7: Trajectory of the particle during the 60
seconds after it passed by the point (5, 2).
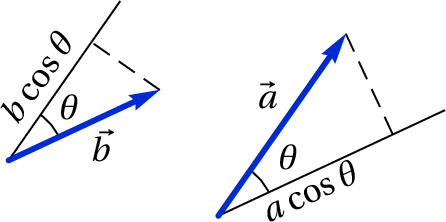
2.1.3. Scalar product
The dot or scalar
product between two vectors
and
, denoted by placing a dot between the vectors,
(to be read as
dot
), is defined as the product of their
magnitudes and the cosine of the angle
between
them
(2.14)
Figure 2.8 shows two vectors
and
and the angle
between
them. The projection of vector
in the direction
of vector
is equal to
and the
projection of vector
in the direction of vector
is equal to
. Hence, the dot
product of the vectors is equal to the projection of one
of them in the direction of the other, times the magnitude
of that second vector.
Figure 2.8: Two vectors
and
and the angle
between them.
The name scalar is due to the fact that, since the
magnitude of the vectors and the angle between them are
both scalar quantities, the dot product gives also a
scalar quantity, independent of the reference frame
chosen.
Two straight lines crossing at a point define two
different angles,
and (180° −
). In the case of vectors there is no ambiguity in
the definition of the angle between them, because if the
two vectors are placed on the same initial point, the
angle between them is always measured in the region where
+
is located (see
Figure 2.9).
The dot product of two vectors with magnitudes
and
will always be within the interval [
,
]. If the angle between the vectors is acute, then
> 0 and the dot product is positive. If
the angle is obtuse, then
< 0 and the dot
product is negative. If the vectors are perpendicular,
then
= 0 and their dot product is zero (see
Figure 2.9). The minimum value
of the dot product,
, is obtained when the
directions of the vectors are opposite and the maximum
value,
, is obtained when both vectors are in the
same direction.
Figure 2.9: Vectors that form acute,
right and obtuse angles between them.
Since unit vectors have magnitude equal to 1, the dot
product between two unit vectors gives the cosine of the
angle between their directions. Thus, the angle between
two directions in space can be obtained as the arc cosine
of the dot product of two unit vectors in those
directions
(2.15)
In terms of the rectangular components of the vectors,
the dot product is,
(2.16)
Using the distributive law of the dot product and the
fact that the dot product between two different
rectangular unit vectors is zero, because they are
perpendicular, while the dot product of any unit vector
with itself is 1, because its magnitude is 1, a very
useful expression is obtained for the dot product
(2.17)
The rectangular components of the two vectors are
different in different reference frames, but their dot
product (
+
+
) must give
the same result in any reference frame, since
is a scalar quantity.
Using expressions 2.14 and
2.17 to compute the dot product of
a vector with itself, the following relation is
obtained
(2.18)
It is then concluded that the magnitude of a vector
with components (
,
,
) is given
by
(2.19)
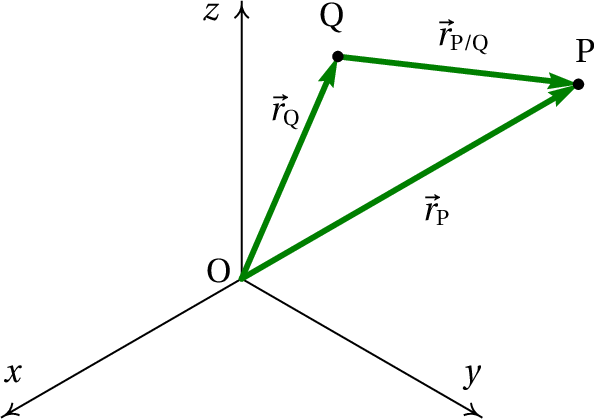
2.2. Relative motion
Figure 2.10 shows the position
vectors
and
of two points P
and Q at the same instant. The vector
is
the position of point P relative to Q. The three vectors
are related by the following vector equation:
(2.20)
If both points are moving, the three vectors will be
continuous functions of time
.
Figure 2.10: Position vectors of two
points P and Q and position of P relative to Q..
The velocity vectors of the two points are the time derivatives
of their position vectors
(2.21)
And the time derivative of the position vector of P relative to
Q gives the velocity vector of P relative to Q:
(2.22)
Therefore, differentiation of the three vectors in
equation 2.20 with respect to
time leads to the relation among the 3 velocities
(2.23)
Namely, the velocity of point P is equal to its velocity
relative to another point Q, plus the velocity of that point
Q. Also, the velocity of P relative to Q equals the
velocity of P minus the velocity of Q.
The relation among the velocities can be differentiated
again to obtain a similar expression for the relative
acceleration vector
(2.24)
For example, when one is traveling in a train moving with
velocity
and observes an object with velocity
as measured inside the train, the velocity of that
object relative to the Earth is equal to
+
. But since the Earth is moving relative to the
Sun with velocity
, the velocity of that object
relative to the Sun is
.
Relative to the Galaxy, one would have to add the velocity
of the Sun relative to the Galaxy, and so on.
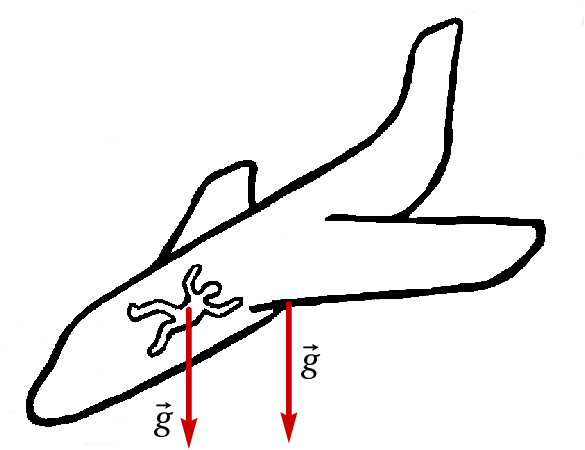
The law of addition of relative velocities and
accelerations is used to train the future astronauts. If the
trainee is falling freely inside an airplane, his
acceleration relative to the Earth is the vector
,
pointing towards the center of the Earth and with magnitude
equal to the acceleration of gravity. If the airplane is
also falling freely to the Earth, its acceleration relative
to Earth is the same vector
(see
Figure 2.11). The acceleration
of the trainee relative to the airplane is equal to the
difference of those two accelerations, which gives
zero. That is, relative to the airplane the trainee does not
accelerate in any direction but floats inside the plane
during the seconds that the airplane pilot can manage to let
the plane fall freely.
Figure 2.11: Airplane and passenger in
free fall (zero relative acceleration).
2.3. Projectile motion
The motion of an object in free fall, when the air
resistance can be neglected, was studied in chapter 1. The
same problem will be discussed here, using vectors. If the
axis is chosen in the vertical direction and pointing
upwards, the vector that represents the acceleration of
gravity is
(2.25)
where
is approximately 9.8 m/s2.
If a projectile
is launched with an initial velocity
, the change
of the velocity due to the acceleration of gravity is in the
opposite direction of
, leading to a new velocity
that will be in the same plane of the vectors
and
. It is then concluded that the trajectory of
the projectile is always on the vertical plane defined by
and
. The only exception is when
is in the vertical direction, in which case
and
do not form a plane and the
trajectory is a vertical straight line.
Example 2.2
A cannon shoots a bullet from the roof of a building from
the position (in SI units):
and with initial velocity (SI units):
where the
axis points upward in the vertical direction
and with origin at the ground level. Assuming that the air
resistance is negligible, find the maximum height reached
by the bullet and the position where it hits the ground.
Solution. The expression for the velocity as a
function of time is found replacing the initial velocity and
the expression 2.25 for the acceleration
of gravity into equation 2.12 and
integrating with respect to time
Where
is measured from the moment when the bullet is shot.
The expression for the position vector is obtained substituting
this expression into equation 2.9 and
evaluating the integral
The maximum height will be reached when the velocity becomes
horizontal, namely, when the component
of the velocity
vanishes
the
component of the position vector at that instant gives
the maximum height
The instant
when the bullet hits the ground is when the
component of the position vector vanishes
and the position of the bullet at that moment is
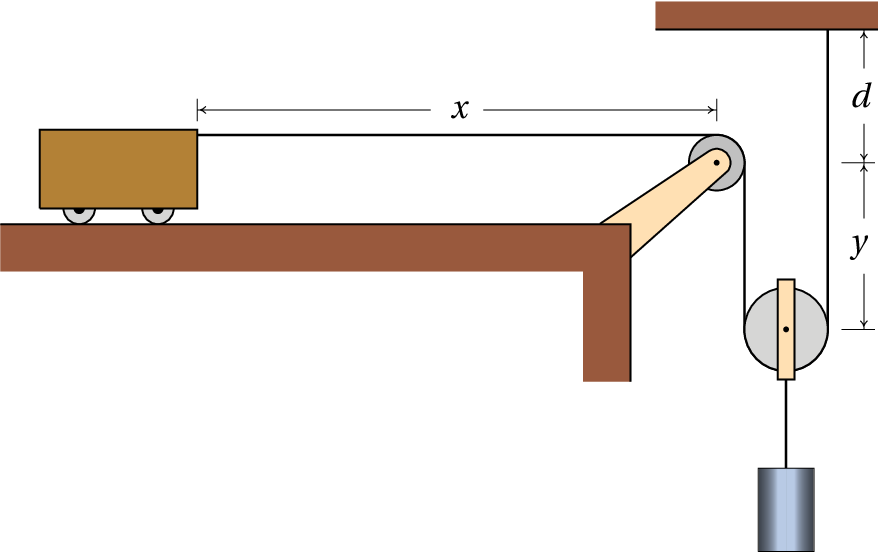
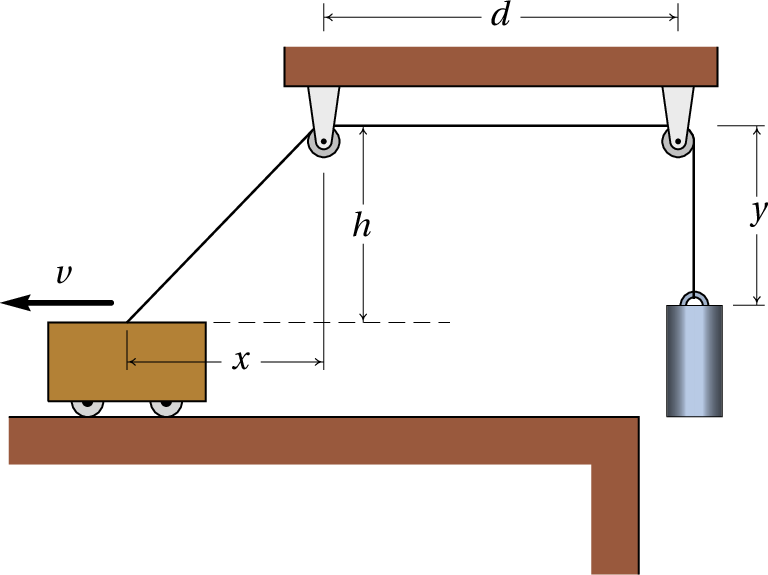
2.4. Dependent motions
Some systems which apparently require several variables to
describe the motion of its parts, can lead to fewer degrees
of freedom due to constraints on those
variables. Figure 2.12 shows an
example; while the cylinder moves down, the cart moves on
the table.
Figure 2.12: System with two dependent motions
and a single degree of freedom.
The motion of the cart can be described by the variation of
the horizontal distance
to the center of the fixed
pulley. The motion of the cylinder is the same as the motion
of the moving pulley, which means that it can be described
by the variation of the vertical distance
between the
centers of the pulleys.
As long as the string remains stretched without breaking,
there will be a relation between the velocities and
accelerations of the cylinder and the cart. To find that
relation, the expression for the length of the string,
,
is written in terms of the two distances that are changing,
and
(2.26)
where
and
are the radii of the two pulleys. The
string is in contact with one fourth of the perimeter of the
fixed pulley (
) and with half of the perimeter
of the moving pulley (
). Keeping in mind that
,
,
and
remain constant and differentiating
both sides of this last equation with respect to time, the
following result is obtained
(2.27)
That is, the speed of the cart will always be twice as
great as the speed of the cylinder. The negative sign means
that if the cylinder goes up (
decreases), the cart moves
to the left (
increases) and the other way around.
Differentiating once more this last equation, with respect
to time, it is found that the tangential acceleration of the
cart is also twice as great as the tangential acceleration
of the cylinder and with opposite sign
(2.28)
Those relations among the positions, velocities and
accelerations of the two objects imply that the system has
only one degree of freedom. Once the expressions for the
position, velocity and acceleration of one of the objects
are know, the corresponding expressions for the other object
are obtained by multiplying or dividing by −2.
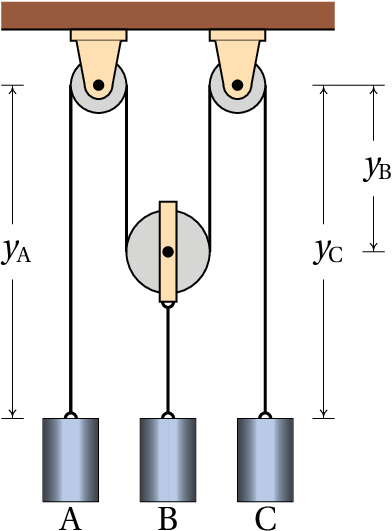
A second example, with two degrees of freedom, is the
system of three pulleys and three cylinders shown in
Figure 2.13. The heights of
the three cylinders are determined from the three distances
,
and
. Since
there is only one string in motion, there will be only one
constraint (the length of that string remains constant)
which can be used to express one of the 3 distances in terms
of the other two and, therefore, the system has two degrees
of freedom.
Figure 2.13: System with three dependent
motions and two degrees of freedom.
The length of the string is
(2.29)
where the constant is equal to the sum of half of the
perimeters of the pulleys, which do not have to be known in
order to find the relations among the velocities or
accelerations, since it will vanish when the derivatives are
computed.
Differentiating both sides of the last equation leads to
(2.30)
In this case there are several possible motions; for
example, if cylinder A is moving up and cylinder C is moving
down with the same speed, then cylinder B will remain at
rest. Or one of the cylinders can be moving down while the
other two are moving up. However, it would not be possible
that the three cylinders move all up or all down.
Differentiation of
equation 2.30 with respect to
time leads to the relation among the accelerations
(2.31)
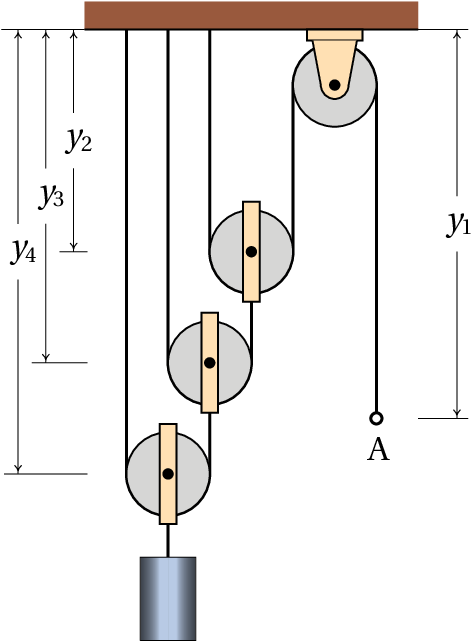
Example 2.3
In the system shown in the figure, find the speed of the
upward motion of the cylinder when the ring A is pulled
down with speed equal to 2 m/s.
Solution. In this case there are 4 parts with
different motions, the three moving pulleys and ring A (the
motion of the cylinder is the same as that of the moving
pulley where it is hung) and 3 strings with constant
lengths. Hence, this system has only one degree of freedom
and the speed of A given will make it possible to find the
velocities of all the other parts.
If
is the distance from the ceiling to the ring and
,
and
the distances from the ceiling to
each of the moving pulleys, as shown in the figure, the
lengths of the three strings are
Differentiating both sides of each of these equations, the
results are
and solving for
in terms of
,
that is, the speed of the downward motion of the ring is 8
times as great as the speed of the upward motion of the
cylinder. Therefore, the cylinder moves up with a speed of
0.25 m/s.
Questions
(To check your answer, click on it.)
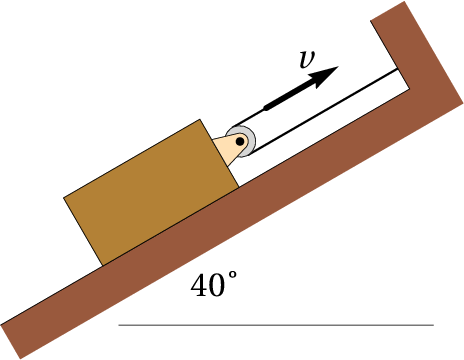
The block in the figure is on an incline with a 40°
angle with the horizontal. One end of the string is
attached to the wall, while the other end is being pushed
with speed
in the direction shown in the figure. What
is the correct expression for the speed of the block in
terms of
?
A car enters a curve with speed equal to 10 m/s in
the South direction and 6 seconds later it still has the
same speed but in the West direction. Find the magnitude
of the average acceleration in that interval of time.
1.67 m/s2
2.36 m/s2
2.89 m/s2
3.33 m/s2
0
A projectile is thrown with an angle of 40° over the
horizontal. If the speed of the projectile when it
reaches its maximum height is 80 m/s and the air
resistance can be neglected, what was the approximate
value of the speed at which it was thrown?
104.4 m/s
124.5 m/s
61.3 m/s
51.3 m/s
80 m/s
A particle moving at 4 m/s in the direction of the
axis is given a constant acceleration of
3 m/s2, in the direction of the
axis,
during 2 seconds. Find the final speed of the particle
after those 2 seconds.
5.0 m/s
6.3 m/s
7.2 m/s
8.4 m/s
10.0 m/s
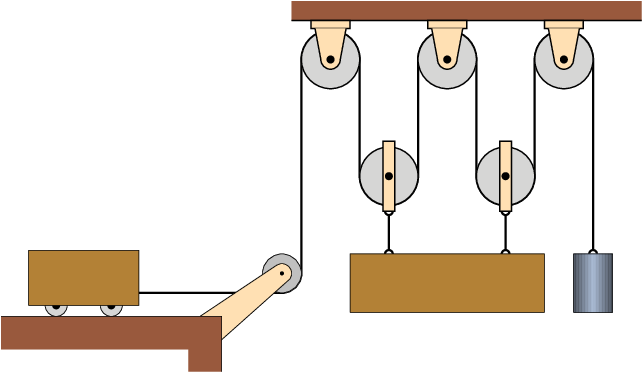
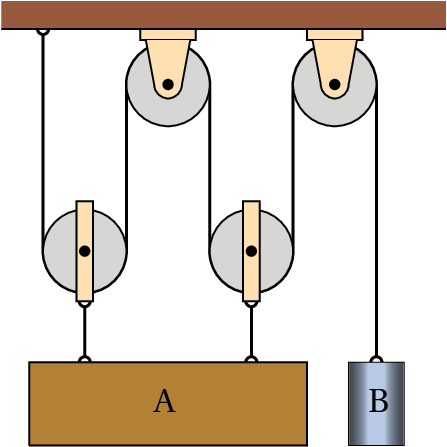
In the system shown in the figure, with a cart, a bar, a
cylinder, 2 moving pulleys and 4 fixed pulleys, the bar
remains always in a horizontal position. How many degrees
of freedom does this system have?
1
2
3
4
5
Problems
(a) Prove
the law of
cosines for plane triangles: any plane triangle
with sides of lengths
,
and
, satisfies the
following equation
where
is the angle opposite to the side of length
; The Pythagorean theorem is a particular case when
is a right angle. Hint: draw the triangle
formed by the two vectors
and
and
their sum
and compute the dot
product
. (b) The angle
between two vectors with magnitudes equal to 5 and 8 units
is 42°; find the magnitude of the sum of those two
vectors using the law of cosines.
Given two vectors
and
,
find:
The magnitude of each vector.
Their dot product
.
The angle between them.
Their sum
.
Their difference
.
The velocity of a particle moving on the
plane is given by the expression:
(SI units). At the initial
moment
the particle is on the
axis with
position
.
Find the moment when it passes through the
axis
and its distance from the origin at that moment.
Compute the acceleration at
and at the
moment when it passes through the
axis.
An object is initially at the position
(SI units) with velocity
and its acceleration at any moment is given
by the expression
. Find the expressions for the velocity
and the position as a function of time.
A projectile is thrown from the ground in
a direction 30° above the horizontal. Find the initial
speed that should be given to the projectile to make it
hit the ground 30 m away from the point where it was
thrown, if the air resistance can be neglected.
A pebble rolls down the roof of a house,
which is inclined 20° from the horizontal. At the
moment when the pebble leaves the roof and starts falling
freely, it has a speed of 4 m/s and it is 6 m
above the ground. Assuming that the air resistance is
negligible,
Find the time it takes to hit the ground, from the
moment when it leaves the roof.
What is the horizontal displacement of the pebble
during its free fall?
Compute the angle between the vertical and the
velocity of the pebble at the moment when it hits the
ground.
A boat transports passengers across a
river, following the shortest path of 1.5 km between
the two river banks. When the boat's motor works at its
full power, the trip takes 20 minutes on a day when the
speed of the river current is 1.2 m/s. Find the speed
of the boat that day: (a) relative to the ground
and (b) relative to the water. (c) Find the
minimum time that it would take the same trip on a day
when the speed of the river current was 0.8 m/s.
A passenger standing on a chair of a train
that travels with constant velocity of magnitude
35 km/h throws an object horizontally in the
direction opposite to the velocity of the train. Relative
to the floor of the train carriage, the object is thrown
at a height of 3 m and it moves horizontally 3 m
before it hits the floor. Find the horizontal distance
traveled by the object, relative to the Earth, from the
moment it was thrown until it hit the carriage floor.
An object moves from the origin at
and at
its position vector is given by
(SI
units).
What will be the distance from the object to the
origin in the limit
?
Find the total distance traveled from
to
(the integral obtained cannot be
solved analytically, but it can be computed
numerically using Maxima's function romberg, which needs the same 4
arguments as integrate; instead of
for the upper limit of the
integral, use
, obtain the result and
gradually increase that value until the result seems
to approach a limit).
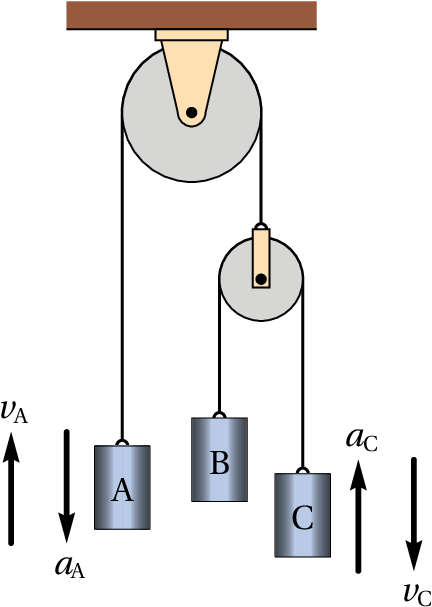
Three cylinders A, B and C are hanged by
the two-pulley system shown in the figure. At a given
instant, the velocity of block A is
m/s,
upwards, and its acceleration is
m/s2, downwards; at the
same instant, the velocity and acceleration of block C
are:
m/s, downwards,
m/s2, upwards. Find the
velocity and acceleration of block B, at the same instant,
and say whether they are in the upwards or downwards
direction.
For the system show in the figure, find
the relation between the velocities and accelerations of
the bar A and the cylinder B, assuming that the bar A only
moves up or down, remaining always in a horizontal
position.
The cart in the figure moves to the left
with constant speed of 4 m/s. The height
is
25 cm and
is chosen as the moment when the
distance
é is zero. Find the expressions for the
velocity and acceleration of the cylinder (assume that the
radii of the pulleys are very small).
Answers
Questions:1. B. 2. B. 3.
A. 4. C. 5. B.
Problems
(a)
. Since the angle between the
vectors is
, it follows that
(b) 12.18 units.
(a)
,
. (b)
−25. (c) 123.5°. (d)
. (e)
.
(a)
s,
m.
(b) At
,
m/s2. When it passes
through the
axis,
m/s2.
The block and the end of the string cannot have the same
speed because the distance between them is increasing.
(click to continue)
Correct
For each centimeter of string being pulled up, the center
of the pulley will move up 1/2 cm on the incline.
(click to continue)
Wrong
The angle does not matter, because an increase or decrease
of that angle does not change the relation between the
motions of the block and the string.
(click to continue)
Wrong
The speed of the block must be smaller than the speed of
the end of the string because the distance between them is
increasing.
(click to continue)
Wrong
The angle does not matter, because an increase or decrease
of that angle does not change the relation between the
motions of the block and the string.
(click to continue)
Wrong
The change of the velocity is not 10 m/s, but rather the
hypotenuse of a right triangle where the other two sides are
the initial and final speeds.
(click to continue)
Correct
(click to continue)
Wrong
The change of the velocity is the hypotenuse of a right
triangle where the other two sides are the initial and final
speeds.
(click to continue)
Wrong
The change of the velocity is the hypotenuse of a right
triangle where the other two sides are the initial and final
speeds.
(click to continue)
Wrong
The change of the velocity is not 0, because the velocity
is a vector and the initial and final velocity vectors are
not equal because their directions are different.
(click to continue)
Correct
(click to continue)
Wrong
The speed is the hypotenuse of a right triangle with one
the other sides equal to the vertical component of the
velocity and the other side equal to the horizontal
component of the velocity, which remains constant. At the
point of maximum height, the vertical side of that triangle
is zero and the horizontal projection of the velocity is
equal to the speed. At the moment when the projectile is
thrown, the angle between the hypotenuse and the horizontal
side is 40°.
(click to continue)
Wrong
The speed is the hypotenuse of a right triangle with one
the other sides equal to the vertical component of the
velocity and the other side equal to the horizontal
component of the velocity, which remains constant. At the
point of maximum height, the vertical side of that triangle
is zero and the horizontal projection of the velocity is
equal to the speed. At the moment when the projectile is
thrown, the angle between the hypotenuse and the horizontal
side is 40°.
(click to continue)
Wrong
The speed is the hypotenuse of a right triangle with one
the other sides equal to the vertical component of the
velocity and the other side equal to the horizontal
component of the velocity, which remains constant. At the
point of maximum height, the vertical side of that triangle
is zero and the horizontal projection of the velocity is
equal to the speed. At the moment when the projectile is
thrown, the angle between the hypotenuse and the horizontal
side is 40°.
(click to continue)
Wrong
The speed is the hypotenuse of a right triangle with one
the other sides equal to the vertical component of the
velocity and the other side equal to the horizontal
component of the velocity, which remains constant. At the
point of maximum height, the vertical side of that triangle
is zero and the horizontal projection of the velocity is
equal to the speed. At the moment when the projectile is
thrown, the angle between the hypotenuse and the horizontal
side is 40°.
(click to continue)
Wrong
During the 2 seconds the acceleration leads to a velocity component
equal to 6 m/s.
(click to continue)
Wrong
The final speed is the hypotenuse of a right triangle with
the other sides equal to
and
. There will be a
component due to the acceleration
.
(click to continue)
Correct
(click to continue)
Wrong
The final speed is the hypotenuse of a right triangle with
the other sides equal to
and
. There will be a
component due to the acceleration
.
(click to continue)
Wrong
The acceleration
leads to a velocity increase of 6
m/s, but since that increase is in the x direction it cannot
be added directly to the initial velocity, which is in the
direction. The sum must be done as a sum of vectors.
(click to continue)
Wrong
There are three objects with different motions: the cart,
the bar and the cylinder (the motion of the moving pulleys
the same as that of the bar) and only one constraint: the
length of the string remains constant.
(click to continue)
Correct
There are three objects with different motions: the cart,
the bar and the cylinder (the motion of the moving pulleys
the same as that of the bar) and only one constraint: the
length of the string remains constant.
(click to continue)
Wrong
There are three objects with different motions: the cart,
the bar and the cylinder (the motion of the moving pulleys
the same as that of the bar) and only one constraint: the
length of the string remains constant.
(click to continue)
Wrong
There are three objects with different motions: the cart,
the bar and the cylinder (the motion of the moving pulleys
the same as that of the bar) and only one constraint: the
length of the string remains constant.
Wrong
There are three objects with different motions: the cart,
the bar and the cylinder (the motion of the moving pulleys
the same as that of the bar) and only one constraint: the
length of the string remains constant.


 Three cylinders A, B and C are hanged by
the two-pulley system shown in the figure. At a given
instant, the velocity of block A is
m/s,
upwards, and its acceleration is
m/s2, downwards; at the
same instant, the velocity and acceleration of block C
are:
m/s, downwards,
m/s2, upwards. Find the
velocity and acceleration of block B, at the same instant,
and say whether they are in the upwards or downwards
direction.
Three cylinders A, B and C are hanged by
the two-pulley system shown in the figure. At a given
instant, the velocity of block A is
m/s,
upwards, and its acceleration is
m/s2, downwards; at the
same instant, the velocity and acceleration of block C
are:
m/s, downwards,
m/s2, upwards. Find the
velocity and acceleration of block B, at the same instant,
and say whether they are in the upwards or downwards
direction.
The block and the end of the string cannot have the same speed because the distance between them is increasing.
(click to continue)