Um sistema mecânico é caraterizado por variáveis que variam em função
do tempo. Analisando essa variação temporal das variáveis
determinam-se as forças que atuam no sistema e, de forma inversa, uma
vez conhecidas essas forças consegue-se prever como será a evolução
dessas variáveis em função do tempo, quando os valores iniciais dessas
variáveis sejam outros. Neste capítulo apresentam-se alguns elementos
importantes para o desenvolvimento da teoria da mecânica
quântica. Começaremos com um sumário de mecânica clássica, seguido de
alguns conceitos matemáticos.
1.1. Síntese de mecânica analítica
A mecânica clássica é uma área muito extensa, desenvolvida a partir do
século XVII, com o trabalho de Galileu, Newton e muitos outros. Nos
séculos XVII e XIX foram propostas abordagens mais gerais e abstratas,
designadas de mecânica analítica. A Mecânica Quântica estende alguns
dos conceitos da mecânica analítica; como tal, para compreender os
postulados básicos da Mecânica Quântica é necessário conhecer os
conceitos de mecânica analítica que vamos abordar nas secções
seguintes.
1.1.1. Movimento no espaço de fase
Na mecânica clássica, o movimento de uma partícula determina-se a
partir da segunda lei de Newton: a força resultante sobre um corpo é
igual à variação da sua quantidade de movimento, , em ordem
ao tempo:
(1.1)
Se a massa do corpo é constante, a derivada da sua quantidade de
movimento é igual à sua massa vezes a sua aceleração. No século XVII,
Kepler determinou as acelerações dos planetas nas suas órbitas em
torno do Sol. Newton, baseado nos resultados de Kepler, determinou a
expressão da força gravítica do Sol sobre qualquer objeto em qualquer
posição do sistema solar e mostrou que tem a mesma forma da força que
a Terra exerce nos corpos na sua "esfera de influência" (vizinhança
da Terra onde a atração do Sol é praticamente igual em todos os pontos
mas a atração da Terra varia significativamente) e estudou como seria
o movimento de qualquer corpo sob a ação de uma força gravítica.
Conhecida a expressão de uma força , a equação
(1.1) permite determinar o movimento de um corpo sob a
ação dessa força. Consideremos o caso em que o corpo só pode
deslocar-se ao longo de uma curva. A posição do corpo ao longo da
curva é dada por um comprimento de arco ao longo da curva. A cada
instante , o estado do corpo é dado pela sua posição,
, e a sua quantidade de movimento . Podemos representar os
diferentes estados, em diferentes instantes, como pontos num plano com
coordenadas e , designado por espaço de fase
(figura 1.1).
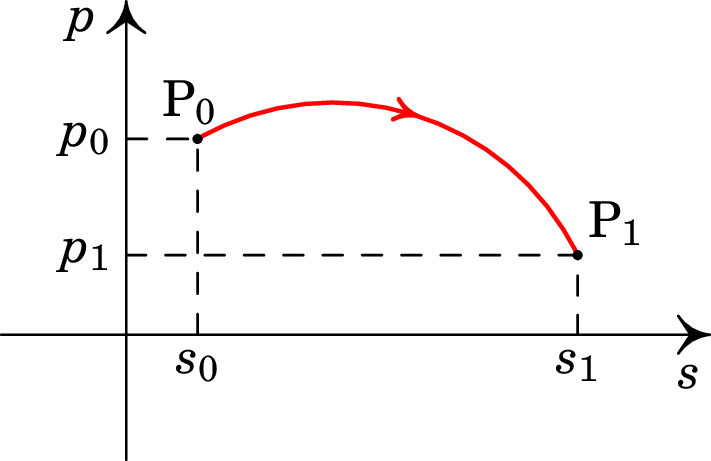
Figura 1.1: Espaço de fase de um corpo em movimento numa dimensão.
Em cada instante , o estado corresponde a um ponto P no espaço de
fase, com coordenadas:
(1.2)
A figura 1.1 mostra o estado
num instante , e o estado num instante posterior
. O estado só pode mudar de forma contínua no espaço de fase;
como tal, existe uma curva contínua entre e
, designada por curva de evolução, que inclui
todos os estados no intervalo de tempo entre e . A cada
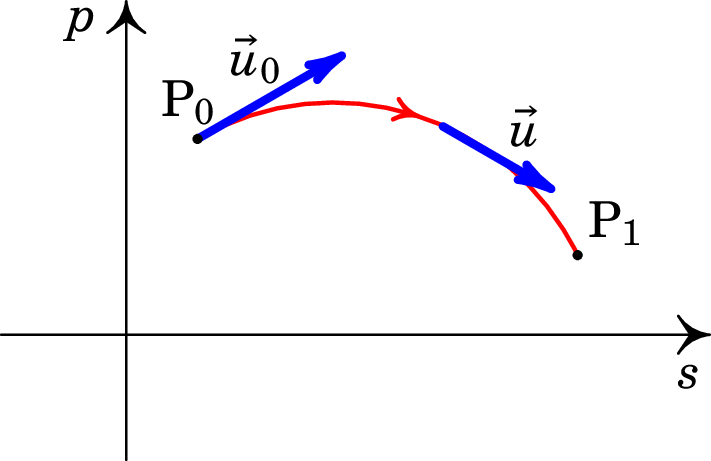
instante, a derivada das coordenadas do estado P definem um vetor
, tangente à curva de evolução, designado por
velocidade de fase:
(1.3)
A figura 1.2 mostra a velocidade de fase
no instante , e a velocidade de fase num instante
intermédio entre e .
Figura 1.2: Velocidade de fase de um corpo em movimento numa dimensão.
A derivada da posição em ordem ao tempo é a velocidade, , igual à sua
quantidade de movimento, , dividida pela sua massa, . E de
acordo com a segunda lei de Newton (1.1), a derivada
da quantidade de movimento é a força resultante . Como tal, as
componentes da velocidade de fase são:
(1.4)
Basta então conhecer a expressão de , que, em geral, é uma função
que depende do tempo , da posição e da quantidade de movimento
, para determinar a velocidade de fase em qualquer ponto do espaço
de fase. A partir de um estado inicial (, ), a descrição do
movimento do corpo obtém-se integrando a expressão da velocidade de
fase, desde até um tempo posterior:
(1.5)
Observe-se que dois estados diferentes, nunca podem evoluir para o
mesmo estado. Se assim fosse, as duas curvas de evolução, diferentes,
encontravam-se num ponto comum, onde teríamos então duas direções
tangentes á duas curvas e, como tal, duas velocidades de fase
diferentes no mesmo ponto, que é impossível; em cada ponto a
velocidade de fase está definida de forma única pela
expressão (1.4).
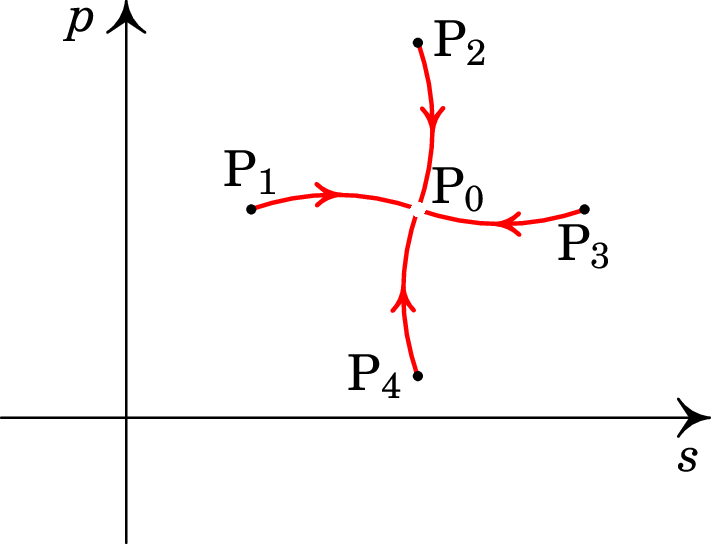
O retrato de fase de um sistema mostra algumas curvas de
evolução no espaço de fase. Por exemplo, a
figura 1.3 mostra um sistema com quatro
curvas de evolução que se aproximam do ponto . Se o
estado inicial do sistema estiver num dos pontos ,
, ou , após algum tempo o
estado estará muito próximo do ponto . No entanto, as
curvas de evolução aproximam-se assimptoticamente desse ponto, sem
chegar exatamente a ele. A velocidade de fase no ponto
é nula, e esse ponto está isolado: nenhuma curva de evolução passa por
ele. Se num instante o sistema estiver no estado ,
permanecerá sempre nesse mesmo estado, sem evoluir. Um ponto como
, onde a velocidade de fase é nula, é designado por
ponto de equilíbrio.
Figura 1.3: Ponto de equilíbrio, e quatro curvas de evolução que se aproximam assimptoticamente desse estado.
O retrato de fase de um sistema pode ser traçado calculando a
velocidade de fase em alguns pontos, e identificando os pontos onde a
velocidade de fase é nula (pontos de equilíbrio). Um retrato de fase
permite saber como evoluirá o sistema em diferentes regiões do espaço
de fase, sem ter de resolver a equação (1.5). Uma
curva de evolução que regressa ao ponto inicial representa um
movimento oscilatório, em que os valores da posição e da velocidade
repetem-se periodicamente. Na secção seguinte veremos um exemplo
muito importante.
1.1.2. O oscilador harmónico simples
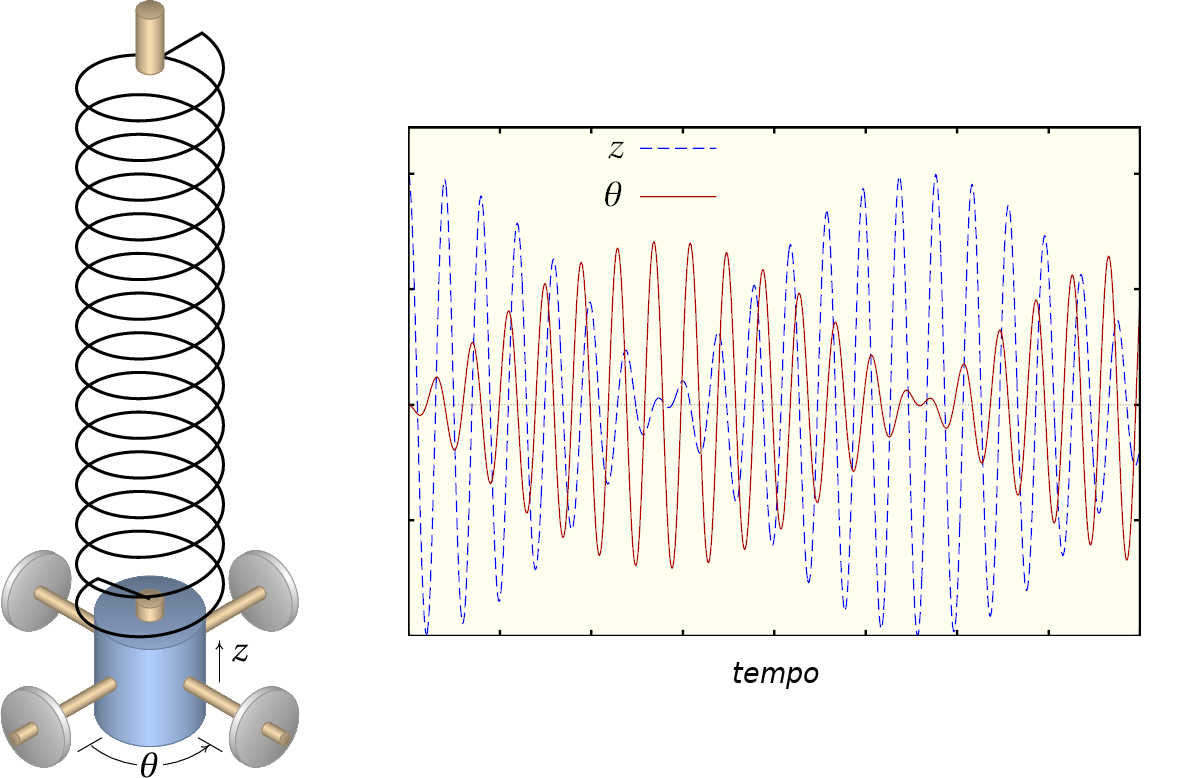
A figura 1.4 mostra um cilindro de massa
pendurado de uma mola com constante elástica . Se a massa se
desloca na vertical, sem oscilar, o movimento é ao longo de uma reta
vertical, e basta uma variável, a altura do cilindro, para
determinar a sua posição em qualquer instante..
Figura 1.4: Massa pendurada de uma mola elástica.
Há duas forças a atuar no objeto: o seu peso , para baixo, e a
força da mola, dada pela lei de Hooke e apontando para a posição em
que a mola não está alongada. Se a altura for medida de baixo
para cima, com origem no ponto onde a mola não está alongada, a força
resultante sobre o objeto é,
(1.6)
as componentes da velocidade e fase são então,
(1.7)
Existe um ponto de equilíbrio no espaço de fase, onde a
velocidade de fase é nula:
(1.8)
que corresponde ao ponto onde a mola desceu unidades, pela ação
do peso, e ficou em repouso. É útil mudar a variável para
uma nova variável , de forma a que o ponto de equilíbrio fique na
origem do espaço de fase, e a expressão da velocidade de fase fique
mais simples. A mudança de variável que usaremos é:
(1.9)
Com essa mudança de variável a velocidade de fase passa a ser:
(1.10)
com módulo igual à distância até à origem do espaço de fase,
, vezes a frequência angular:
(1.11)
e perpendicular ao segmento desde a origem até o ponto
no espaço de fase.
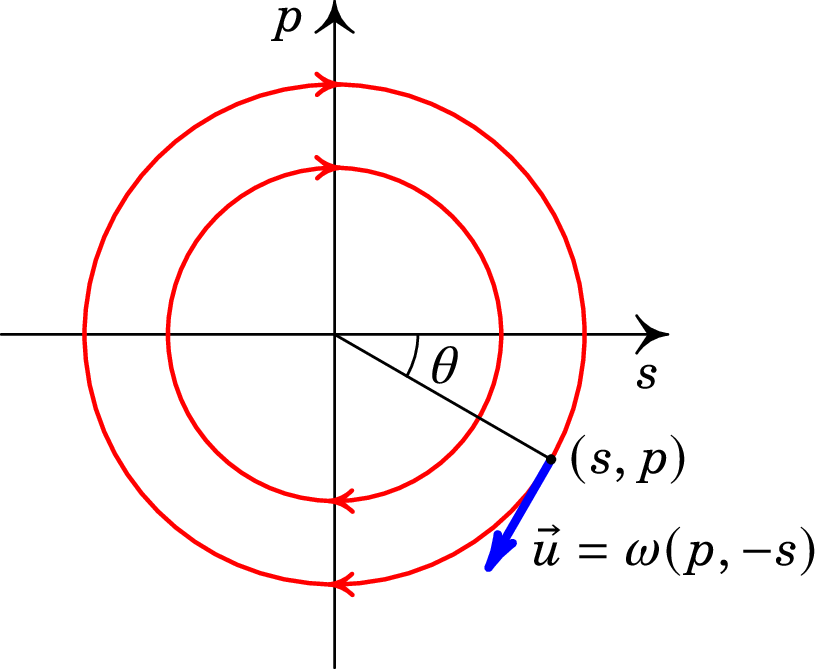
Figura 1.5: Retrato de fase do oscilador harmónico simples.
A figura 1.5
é o retrato de fase do oscilador harmónico, que mostra as
possíveis curvas de evolução. Todos os possíveis movimentos são
circumferências no espaço de fase, percorridas com velocidade
de módulo constante, igual a .
Arbitrando no instante em que o estado passa pelo semieixo
positivo , em , o ângulo que o estado faz com esse semieixo,
em , é , e a posição é,
(1.12)
Substituindo na equação (1.9), a altura do
cilindro, em função do tempo, é:
(1.13)
onde a amplitude do movimento é uma constante, ,
que depende da posição inicial, e o movimento é oscilatório com
frequência:
(1.14)
1.1.3. Função hamiltoniana
Nos sistemas em que a força resultante depende apenas da posição e é
conservativa, existe uma função energia potencial. No caso do
movimento em uma dimensão, se a força resultante depende apenas da
posição , é conservativa e a energia potencial é uma primitiva
da força:
(1.15)
Define-se a função hamiltoniana,
(1.16)
e as duas componentes da velocidade de fase, são obtidas a partir das
derivadas da função hamiltoniana:
(1.17)
No caso geral, um sistema com variáveis de estado e é
designado por sistema hamiltoniano, se existe uma função hamiltoniana
que permite calcular as expressões das derivadas temporais de
e a partir das derivadas parciais de , de acordo com as
equações de Hamilton (1.17).
No caso do oscilador harmónico simples da secção anterior, a energia
potencial associada à força (1.6) é,
(1.18)
e a função hamiltoniana é,
(1.19)
e as duas equações de Hamilton são:
(1.20)
1.1.4. Parênteses de Poisson
Num sistema com variáveis de estado (, ), definem-se os
parênteses de Poisson de duas funções e igual à
expressão,
(1.21)
Algumas propriedades importantes dos parênteses de Poisson são as
seguintes:
Anticomutatividade:
Linearidade:
Regra da cadeia:
Identidade de Jacobi:
A anticomutatividade implica que os parênteses de qualquer função com
si própria são nulos: . A derivada em ordem ao tempo de
qualquer função do estado, pode ser calculada pela regra da
cadeia:
(1.22)
e, se o sistema é hamiltoniano, usando as equações de Hamilton temos,
(1.23)
conclui-se que a derivada temporal da função é igual aos parênteses
de Poisson da função com a função hamiltoniana:
(1.24)
Isto é, a evolução temporal de qualquer função do estado é dada pelos
parênteses de Poisson da função com a função hamiltoniana. As
equações de Hamilton são dois casos particulares da equação
geral (1.24), quando for igual a uma das variáveis de
estado.
No caso mais geral, o estado de um sistema é dado por variáveis de
posição: , ,…, e quantidades de movimento
associadas a essas variáveis de posição: , ,…,
. As funções de estado dependem dessas variáveis, e os
parênteses de Poisson entre duas variáveis de estado são:
(1.25)
A função hamiltoniana é também uma função das variáveis de
estado, e a derivada temporal de qualquer função de estado é igual aos
parênteses de Poisson da função com a função hamiltoniana.
1.2. Números complexos
A forma retangular dum número complexo é
(1.26)
onde (parte real) e (parte imaginária) são dois números reais,
no campo dos números reais, , e o produto
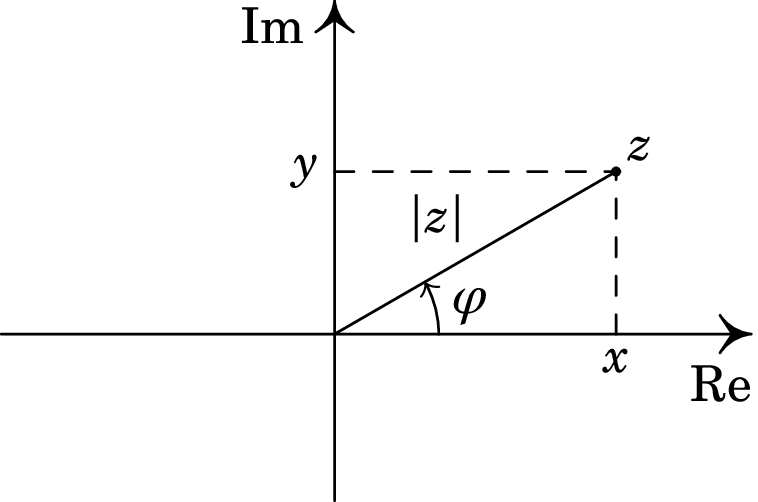
representa um número imaginário. A figura 1.6
mostra o chamado plano complexo, que é um plano onde cada
ponto corresponde a um número complexo ; as suas partes real e
imaginária são as projeções e em dois eixos perpendiculares,
designados de Re (eixo real) e Im (eixo imaginário).
Figura 1.6: Número complexo representado no plano complexo.
Definem-se o módulo e o argumento
do número complexo :
(1.27)
onde é a função tangente inversa nos 4 quadrantes,
definida por,
(1.28)
onde é a função definida em (1.28) e
o argumento está no intervalo .
No plano complexo, é a distância desde o ponto onde se encontra
, até à origem e é o ângulo que o segmento desde até
à origem faz com o semieixo Re positivo (ver
figura 1.6).
O número complexo pode então ser escrito também na chamada
forma polar,
(1.29)
A função complexa entre parêntesis na equação
(1.29) costuma ser designada
, ou ainda,
, por ter propriedades semelhantes à função exponencial
real . Para mostrar mais facilmente algumas operações
entre números complexos, escreveremos a forma polar usando a função
exponencial:A expressão
é
designada de fórmula de Euler.
(1.30)
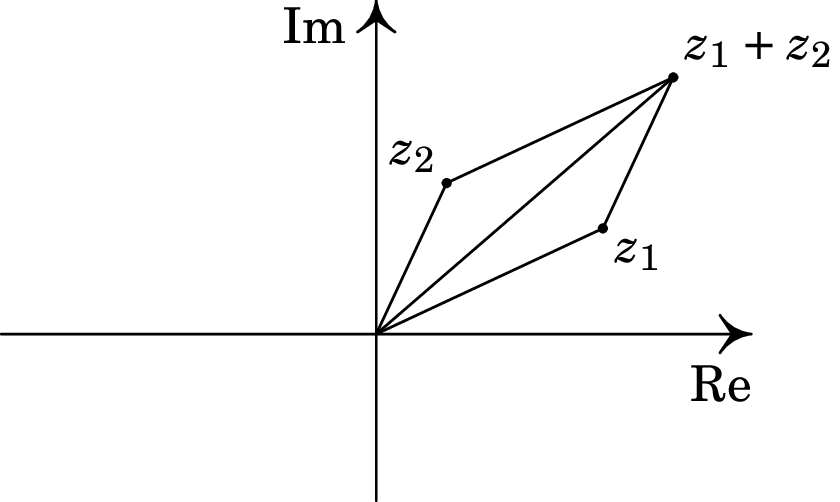
A soma de dois números complexos, e
, é outro número complexo, , com partes
real e imaginária iguais à soma das respetivas partes dos dois
números:
(1.31)
esta é a mesma forma da soma de dois vetores no plano , em função
das suas componentes. Como tal, a soma de números complexos segue a
mesma regra do paralelogramo, no plano complexo, do que a soma de
vetores, como mostra a figura 1.7. E a soma de
números complexos tem as mesmas propriedades da soma de vetores.
Figura 1.7: Adição de números complexos no plano complexo.
Em contraste com os vetores, no caso dos números complexos é possível
definir um produto que dá como resultado outro número complexo e tem
as mesmas propriedades do produto entre números reais (comutatividade,
associatividade, distributividade, etc.). O produto entre dois números
complexos, e , é outro número
complexo, , que pode ser obtido usando a sua propriedade
distributiva e o facto de que :
(1.32)
Produto este que tem uma expressão mais simples em termos das
componentes polares dos números complexos:
(1.33)
Ou seja, o produto tem módulo igual ao produto dos módulos de
e e argumento igual à soma dos argumentos de e
. E a divisão é feita dividindo os módulos e subtraindo os argumentos:
(1.34)
Define-se o conjugado, , do número , mantendo o
módulo igual mas trocando o sinal do argumento:
(1.35)
A conjugação de números complexos tem as seguintes propriedades:
O conjugado do conjugado é igual ao número inicial:
(1.36)
O produto de um número complexo com o seu conjugado é igual ao seu
módulo ao quadrado:
(1.37)
Se o conjugado de um número complexo for igual a si próprio,
é equivalente a dizer que o número é real (parte imaginária nula):
(1.38)
O conjugado da soma de dois números complexos é igual à soma dos
conjugados dos números:
(1.39)
O conjugado do produto de dois números complexos é igual ao produto dos
conjugados dos números:
(1.40)
1.3. Teoria das probabilidades
Uma experiência é dita aleatória, se não conseguirmos prever
o valor obtido para certas variáveis, de forma que o resultado poderá
ser diferente para várias repetições da mesma experiência. Um exemplo
é o lançamento de uma moeda ou de um dado; a cada lançamento não
conseguimos prever se o resultado da moeda será cara ou coroa, ou qual
dos seis números ficará na fase superior do lado.
Tal vez se soubéssemos com precisão os valores de alguns parámetros,
tais como posição e velocidade inicial do dado, velocidade,
temperatura e pressão em todos os pontos do ar na trajetória do dado,
etc., seria possível prever o resultado. Mas são muitas variáveis que
podem afetar o resultado e um pequeno erro na medição de algumas
dessas variáveis pode conduzir a uma previsão errada. No caso da
mecânica quântica veremos que existem experiências realmente
aleatórias, em que acreditamos que é impossível prever o resultado
exato.
Se os possíveis resultados da experiência aleatória forem
. Se a experiência for repetida um número
elevado de vezes, , a probabilidade de que o resultado
seja obtido é igual ao número de vezes que o resultado foi ,
dividido pelo número de repetições . Como tal, a soma das
probabilidades de todos os possíveis resultados é igual a 1:
(1.41)
No caso do lançamento do dado, os possíveis resultados são
e a probabilidade de cada um desse resultados é
.
O conjunto de possíveis resultados pode ser um conjunto contínuo; por
exemplo, uma variável que pode ter qualquer valor entre e
. Nesse caso há uma função contínua tal que a
probabilidade do resultado estar num pequeno intervalo entre e
(com e entre e ) é igual a,
(1.42)
E o integral de no intervalo de possíveis valores é igual a 1:
(1.43)
Se uma função associa um valor a cada possível resultado
, a probabilidade da função ter o valor é igual a
. O valor médio da função, ou valor esperado, é
obtido somando os possíveis valores de vezes as respetivas
probabilidades:
(1.44)
Para determinar que tão dispersos estão os possíveis valores de
e relação ao valor esperado , define-se a
variança da função , igual ao valor esperado do desvio
quadrático em relação ao valor esperado:
(1.45)
e o desvio padrão é a raiz quadrada da variança:
(1.46)
Exercícios
1.1
Demonstre a identidade de Jacobi para parênteses de Poisson.
Resolução. Desenvolvendo o primeiro termo na identidade de
Jacobi temos:
e calculando as derivadas dos produtos obtêm-se oito termos:
(1.47)
O segundo e terceiro termos na identidade de Jacobi obtêm-se
permutando as funções , e , de forma cíclica no resultado
anterior:
(1.48)
(1.49)
Observando os oito termos em cada uma das expressões (1.47),
(1.48) e (1.49), observa-se que os termos 1 e 6
anulam-se entre as equações (1.47) e (1.49), e
entre (1.49) e (1.48); os termos 2 e 3 anulam-se
entre (1.47) e (1.48), e entre (1.48) e
(1.49); os termos 4 e 7 anulam-se entre (1.47) e
(1.48), e entre (1.49) e (1.47); e,
finalmente, os termos 5 e 8 anulam-se entre (1.47) e
(1.49), e entre (1.48) e (1.47).
1.2
O momento angular de
um corpo é o produto vetorial entre o seu vetor posição e a sua
quantidade de movimento:
Calcule os três parênteses de Poisson:
Resolução. Há seis variáveis de estado, as três coordenadas
cartesianas, , e , e as três componentes da quantidade de
movimento, , e .
O produto vetorial entre e
conduz às componentes do momento
angular:
e a partir de (1.50) unicamente os dois primeiros
termos são diferentes de zero e são iguais a:
Finalmente,
em que unicamente os terceiro e quarto termos são diferentes de zero e
conduzem a:
1.3
Simplifique a seguinte expressão, encontrando as partes real e
imaginária do resultado:
Resolução. Começamos por realizar a soma entre os
parênteses retos, e a seguir o produto no numerador:
Para dividir o numerador pelo denominador, podemos multiplicar o
numerador e o denominador pelo conjugado complexo do denominador, para
ficarmos com um número real no denominador:
1.4
Num jogo de cartas, o jogador A baralha as 52 cartas e o jogador B
escolhe uma carta qualquer. Se a carta escolhida for um número par,
o jogador B paga 3 euros ao jogador A, se for um número ímpar, o
jogador A paga 1 euro ao jogador B, e se a carta for um ás o jogador
A paga 10 euros ao jogador B. A carta escolhida é reposta no baralho
e o jogo repete-se. Qual dos dois jogadores tem maior probabilidade
de ganhar mais dinheiro após várias repetições do jogo e qual o
valor médio que ganhará após várias jogadas?
Resolução. Em cada grupo de 13 cartas há um ás, 5 cartas com
número par (2, 4, 6, 8 e 10), e 4 cartas com número ímpar (3, 5, 7 e
9). Como tal, as probabilidades de o jogador B retirar um ás, um
número par ou um número ímpar são:
e o que o jogador B ganha/perde se a carta escolhida for um ás, número
par, ou número ímpar é:
O valor esperado do ganho do jogador B, cada vez que escolhe uma
carta, é então:
Ou seja, quem tem maior probabilidade de ganhar é o jogador A, e em
média ganha 1/13 euros a cada jogada. Após várias jogadas, terá ganho
em média o número de jogadas divididas por 13, em euros.
1.5
Num teste com 20 perguntas de escolha múltipla, cada pergunta tem 5
possíveis respostas. A cotação é de um valor por cada resposta
correta e zero valores se a pergunta não for respondida ou
respondida de forma errada. Se os estudantes respondem todas as
perguntas, selecionando de forma aleatória a resposta das perguntas
que não sabem responder: (a) Entre que valores espera-se que
esteja a nota dos estudantes? (b) Quantos valores deveriam
ser descontados por cada resposta errada, para que a nota esperada
estivesse compreendida entre 0 e 20?
Resolução. (a) A nota máxima, de um estudante que sabe
responder a todas as perguntas, é 20. A nota mínima, de um estudante
que responde todas as perguntas de forma aleatória, sera o número de
respostas corretas, que em média será 1/5 do número total de
perguntas. Como tal, a nota esperada dos estudantes estará entre 4 e
20 valores.
(b) Para que a nota esperada esteja entre 0 e 20 valores, há
que garantir que o valor esperado da cotação de cada pergunta seja
igual a zero, para que as perguntas respondidas de forma aleatória
tenham um valor total nulo. Como nas 5 possíveis respostas há uma
correta, com cotação de 1 valor, as restantes 4 respostas erradas
deverão ter uma cotação total de valor. Cada resposta errada
deverá descontar valores.