Na mecânica clássica, o movimento de uma partícula determina-se a
partir da segunda lei de Newton: a força resultante sobre um corpo é
igual à variação da sua quantidade de movimento, , em ordem
ao tempo:
(3.1)
Se a massa do corpo é constante, a derivada da sua quantidade de
movimento é igual à sua massa vezes a sua aceleração. No século XVII,
Kepler determinou as acelerações dos planetas nas suas órbitas em
torno do Sol. Newton, baseado nos resultados de Kepler, determinou a
expressão da força gravítica do Sol sobre qualquer objeto em qualquer
posição do sistema solar e mostrou que tem a mesma forma da força que
a Terra exerce nos corpos na sua "esfera de influência" (vizinhança
da Terra onde a atração do Sol é praticamente igual em todos os pontos
mas a atração da Terra varia significativamente) e estudou como seria
o movimento de qualquer corpo sob a ação de uma força gravítica.
Conhecida a expressão de uma força , a equação
(3.1) permite determinar o movimento de um corpo sob a
ação dessa força. Consideremos o caso em que o corpo só pode
deslocar-se ao longo de uma curva. A posição do corpo ao longo da
curva é dada por um comprimento de arco ao longo da curva. A cada
instante , o estado do corpo é dado pela sua posição,
, e a sua quantidade de movimento . Podemos representar os
diferentes estados, em diferentes instantes, como pontos num plano com
coordenadas e , designado por espaço de fase
(figura 3.1).
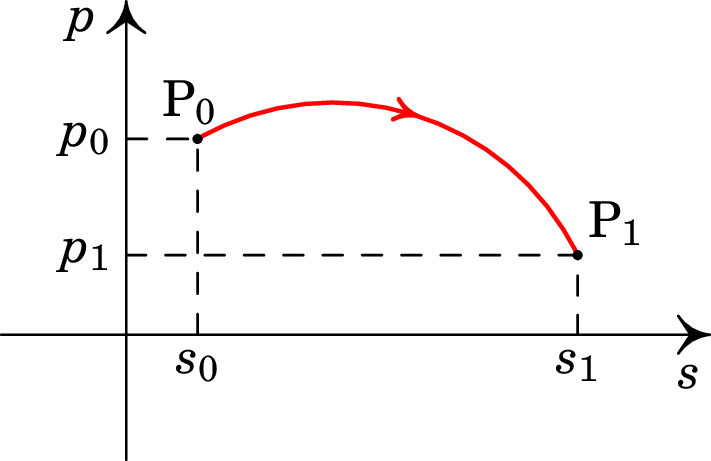
Figure 3.1: Espaço de fase de um corpo em movimento numa dimensão.
Em cada instante , o estado corresponde a um ponto P no espaço de
fase, com coordenadas:
(3.2)
A figura 3.1 mostra o estado
num instante , e o estado num instante posterior
. O estado só pode mudar de forma contínua no espaço de fase;
como tal, existe uma curva contínua entre e
, designada por curva de evolução, que inclui
todos os estados no intervalo de tempo entre e . A cada
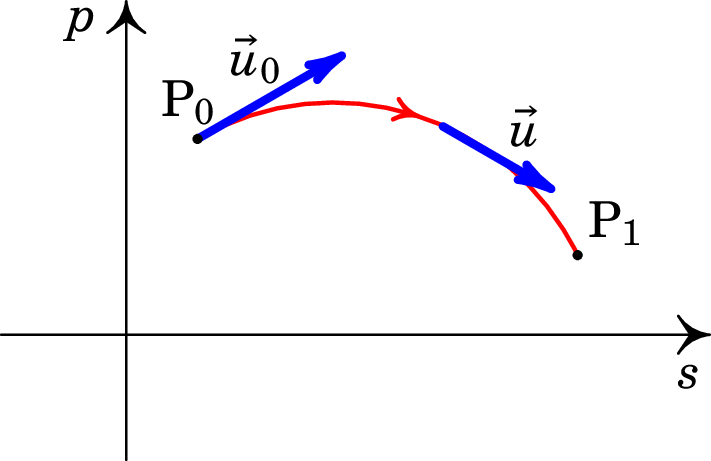
instante, a derivada das coordenadas do estado P definem um vetor
, tangente à curva de evolução, designado por
velocidade de fase:
(3.3)
A figura 3.2 mostra a velocidade de fase
no instante , e a velocidade de fase num instante
intermédio entre e .
Figure 3.2: Velocidade de fase de um corpo em movimento numa dimensão.
A derivada da posição em ordem ao tempo é a velocidade, , igual à sua
quantidade de movimento, , dividida pela sua massa, . E de
acordo com a segunda lei de Newton (3.1), a derivada
da quantidade de movimento é a força resultante . Como tal, as
componentes da velocidade de fase são:
(3.4)
Basta então conhecer a expressão de , que, em geral, é uma função
que depende do tempo , da posição e da quantidade de movimento
, para determinar a velocidade de fase em qualquer ponto do espaço
de fase. A partir de um estado inicial (, ), a descrição do
movimento do corpo obtém-se integrando a expressão da velocidade de
fase, desde até um tempo posterior:
(3.5)
Observe-se que dois estados diferentes, nunca podem evoluir para o
mesmo estado. Se assim fosse, as duas curvas de evolução, diferentes,
encontravam-se num ponto comum, onde teríamos então duas direções
tangentes á duas curvas e, como tal, duas velocidades de fase
diferentes no mesmo ponto, que é impossível; em cada ponto a
velocidade de fase está definida de forma única pela
expressão (3.4).
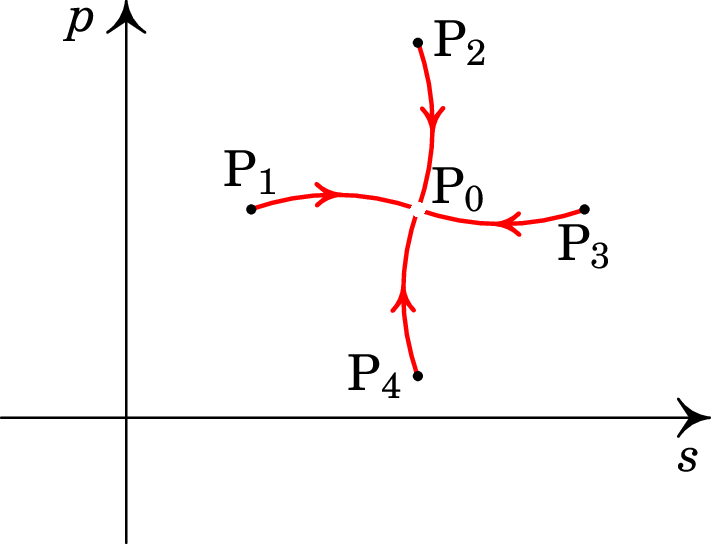
O retrato de fase de um sistema mostra algumas curvas de
evolução no espaço de fase. Por exemplo, a
figura 3.3 mostra um sistema com quatro
curvas de evolução que se aproximam do ponto . Se o
estado inicial do sistema estiver num dos pontos ,
, ou , após algum tempo o
estado estará muito próximo do ponto . No entanto, as
curvas de evolução aproximam-se assimptoticamente desse ponto, sem
chegar exatamente a ele. A velocidade de fase no ponto
é nula, e esse ponto está isolado: nenhuma curva de evolução passa por
ele. Se num instante o sistema estiver no estado ,
permanecerá sempre nesse mesmo estado, sem evoluir. Um ponto como
, onde a velocidade de fase é nula, é designado por
ponto de equilíbrio.
Figure 3.3: Ponto de equilíbrio, e quatro curvas de evolução que se aproximam assimptoticamente desse estado.
O retrato de fase de um sistema pode ser traçado calculando a
velocidade de fase em alguns pontos, e identificando os pontos onde a
velocidade de fase é nula (pontos de equilíbrio). Um retrato de fase
permite saber como evoluirá o sistema em diferentes regiões do espaço
de fase, sem ter de resolver a equação (3.5). Uma
curva de evolução que regressa ao ponto inicial representa um
movimento oscilatório, em que os valores da posição e da velocidade
repetem-se periodicamente. Na secção seguinte veremos um exemplo
muito importante.
3.2. O oscilador harmónico simples
A figura 3.4 mostra um cilindro de massa
pendurado de uma mola com constante elástica . Se a massa se
desloca na vertical, sem oscilar, o movimento é ao longo de uma reta
vertical, e basta uma variável, a altura do cilindro, para
determinar a sua posição em qualquer instante..
Figure 3.4: Massa pendurada de uma mola elástica.
Há duas forças a atuar no objeto: o seu peso , para baixo, e a
força da mola, dada pela lei de Hooke e apontando para a posição em
que a mola não está alongada. Se a altura for medida de baixo
para cima, com origem no ponto onde a mola não está alongada, a força
resultante sobre o objeto é,
(3.6)
as componentes da velocidade e fase são então,
(3.7)
Existe um ponto de equilíbrio no espaço de fase, onde a
velocidade de fase é nula:
(3.8)
que corresponde ao ponto onde a mola desceu unidades, pela ação
do peso, e ficou em repouso. É útil mudar a variável para
uma nova variável , de forma a que o ponto de equilíbrio fique na
origem do espaço de fase, e a expressão da velocidade de fase fique
mais simples. A mudança de variável que usaremos é:
(3.9)
Com essa mudança de variável a velocidade de fase passa a ser:
(3.10)
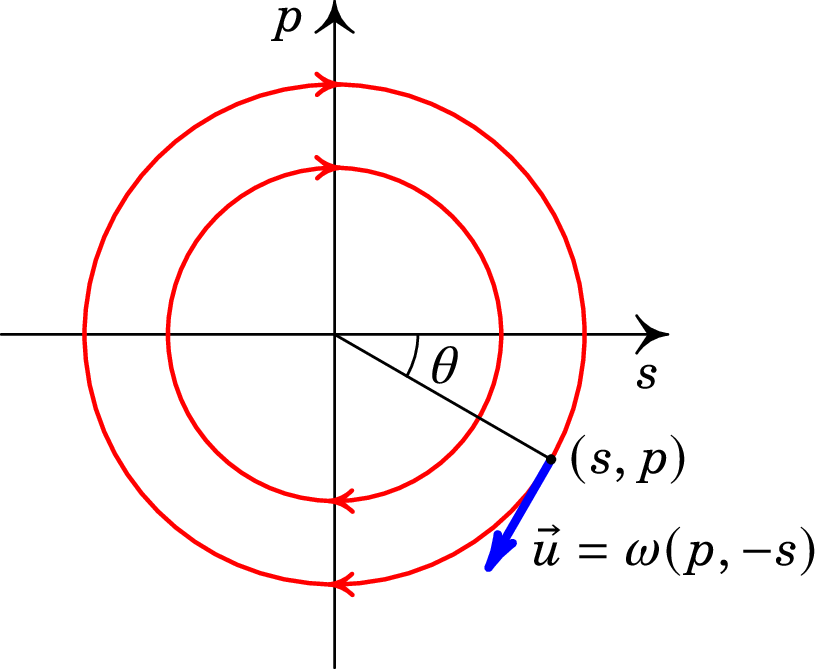
com módulo igual à distância até à origem do espaço de fase,
, vezes a frequência angular:
(3.11)
e perpendicular ao segmento desde a origem até o ponto
no espaço de fase.
Figure 3.5: Retrato de fase do oscilador harmónico simples.
A figura 3.5
é o retrato de fase do oscilador harmónico, que mostra as
possíveis curvas de evolução. Todos os possíveis movimentos são
circumferências no espaço de fase, percorridas com velocidade
de módulo constante, igual a .
Arbitrando no instante em que o estado passa pelo semieixo
positivo , em , o ângulo que o estado faz com esse semieixo,
em , é , e a posição é,
(3.12)
Substituindo na equação (3.9), a altura do
cilindro, em função do tempo, é:
(3.13)
onde a amplitude do movimento é uma constante, ,
que depende da posição inicial, e o movimento é oscilatório com
frequência:
(3.14)
3.3. Função hamiltoniana
Nos sistemas em que a força resultante depende apenas da posição e é
conservativa, existe uma função energia potencial. No caso do
movimento em uma dimensão, se a força resultante depende apenas da
posição , é conservativa e a energia potencial é uma primitiva
da força:
(3.15)
Define-se a função hamiltoniana,
(3.16)
e as duas componentes da velocidade de fase, são obtidas a partir das
derivadas da função hamiltoniana:
(3.17)
No caso geral, um sistema com variáveis de estado e é
designado por sistema hamiltoniano, se existe uma função hamiltoniana
que permite calcular as expressões das derivadas temporais de
e a partir das derivadas parciais de , de acordo com as
equações de Hamilton (3.17).
No caso do oscilador harmónico simples da secção anterior, a energia
potencial associada à força (3.6) é,
(3.18)
e a função hamiltoniana é,
(3.19)
e as duas equações de Hamilton são:
(3.20)
3.4. Parênteses de Poisson
Num sistema com variáveis de estado (, ), definem-se os
parênteses de Poisson de duas funções e igual à
expressão,
(3.21)
Algumas propriedades importantes dos parênteses de Poisson são as
seguintes:
Anticomutatividade:
Linearidade:
Regra da cadeia:
Identidade de Jacobi:
A anticomutatividade implica que os parênteses de qualquer função com
si própria são nulos: . A derivada em ordem ao tempo de
qualquer função do estado, pode ser calculada pela regra da
cadeia:
(3.22)
e, se o sistema é hamiltoniano, usando as equações de Hamilton temos,
(3.23)
conclui-se que a derivada temporal da função é igual aos parênteses
de Poisson da função com a função hamiltoniana:
(3.24)
Isto é, a evolução temporal de qualquer função do estado é dada pelos
parênteses de Poisson da função com a função hamiltoniana. As
equações de Hamilton são dois casos particulares da equação
geral (3.24), quando for igual a uma das variáveis de
estado.
No caso mais geral, o estado de um sistema é dado por variáveis de
posição: , ,…, e quantidades de movimento
associadas a essas variáveis de posição: , ,…,
. As funções de estado dependem dessas variáveis, e os
parênteses de Poisson entre duas variáveis de estado são:
(3.25)
A função hamiltoniana é também uma função das variáveis de
estado, e a derivada temporal de qualquer função de estado é igual aos
parênteses de Poisson da função com a função hamiltoniana.
Exercícios
3.1. Demonstre a identidade de Jacobi para parênteses de Poisson.
Resolução. Desenvolvendo o primeiro termo na identidade de
Jacobi temos:
e calculando as derivadas dos produtos obtêm-se oito termos:
(3.26)
O segundo e terceiro termos na identidade de Jacobi obtêm-se
permutando as funções , e , de forma cíclica no resultado
anterior:
(3.27)
(3.28)
Observando os oito termos em cada uma das expressões
(3.26), (3.27) e (3.28), observa-se que
os termos 1 e 6 anulam-se entre as equações (3.26) e
(3.28), e entre (3.28) e (3.27); os termos
2 e 3 anulam-se entre (3.26) e (3.27), e entre
(3.27) e (3.28); os termos 4 e 7 anulam-se entre
(3.26) e (3.27), e entre (3.28) e
(3.26); e, finalmente, os termos 5 e 8 anulam-se entre
(3.26) e (3.28), e entre (3.27) e
(3.26).
3.2. O momento angular de um corpo é o produto
vetorial entre o seu vetor posição e a sua quantidade de
movimento:
Calcule os três parênteses de Poisson:
Resolução. Há seis variáveis de estado, as três
coordenadas cartesianas, , e , e as três componentes da
quantidade de movimento, , e .
O produto vetorial entre e
conduz às componentes do momento
angular: