Algumas equações que dependem de uma variável podem ser resolvidas
para obter um ou mais valores de que verificam a equação. Por
exemplo, a equação tem duas soluções, e ,
e a equação = 3 tem uma única solução
. Existem equações,
chamadas transcendentes, em que não é
possível escrever uma expressão matemática para a solução e até
pode ser difícil determinar se existem soluções e quantas. Por
exemplo, a equação é uma equação transcendente; as suas
soluções só podem ser calculadas de forma aproximada, usando métodos
numéricos.
Para facilitar a procura das soluções de uma equação transcendente, é
conveniente rescrevê-la na forma ; por exemplo, a equação
pode ser escrita como . O problema de
encontrar as soluções consiste então em encontrar
as raízes da função , ou seja, os
pontos onde o gráfico de corta o eixo das abcissas. No exemplo
anterior, , o gráfico da função no intervalo obtém-se no Maxima com o seguinte comando:
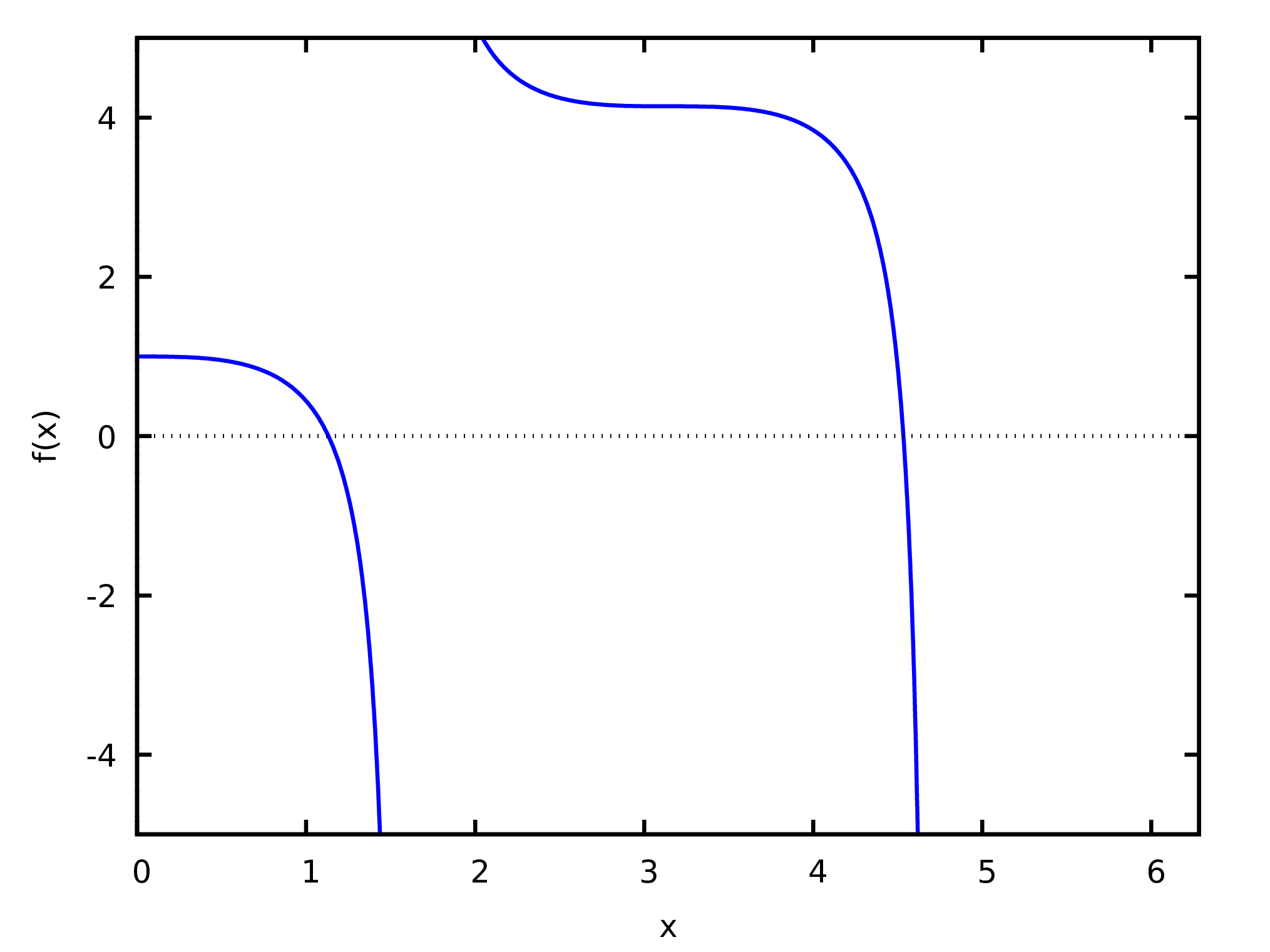
e o resultado (ver Figura 1.1) mostra que
nesse intervalo existem duas soluções, próximas dos valores e
.
Figura 1.1: Gráfico da função .
No caso das funções contínuas, se em dois pontos diferentes e
(admitindo ), os sinais de e são diferentes,
deve existir pelo menos uma raiz de no intervalo <
. No caso da Figura 1.1, vê-se que
é positiva mas é negativa; assim sendo, existe pelo
menos uma raiz entre 0 e 1.3. Em , é positiva, mas
comparando com o valor negativo de não se pode concluir que
existam raízes no intervalo , já que nesse intervalo a
função não é contínua.
1.2. Método de bissecções
Dados dois valores diferentes e , onde e
(ou seja, os sinais de e são
diferentes), calculam-se o ponto meio e o valor da
função nesse ponto, . Se for nula, é a raiz
procurada; caso contrário, se o sinal de for o mesmo de
substitui-se por , se o sinal de for o
mesmo de substitui-se por e o processo repete-se
indefinidamente até se obter um intervalo de comprimento muito
reduzido:
(1.1)
onde /2 é a precisão com que se quer calcular a raiz. O
valor final de será o que melhor aproxima o valor da raiz, com a
precisão desejada.
Exemplo 1.1
Calcule a raiz de no intervalo 0 <
< 1.3 com 2 casas decimais, usando o método de bisseções.
Resolução. Definem-se primeiro a função e os pontos iniciais:
É importante dar os valores iniciais em formato de vírgula flutuante,
para que a função tan seja calculada, em
vírgula flutuante, em vez de ficar como valor simbólico. Note-se
também que no Maxima 1. é interpretado como o inteiro 1, mas 1.0 é
representado em vírgula flutuante.
Como agora a função é negativa, substitui-se por e
repete-se o mesmo procedimento até se observar que o ponto meio não
mude, até à segunda casa decimal:
O valor da raiz é . Há que ter muita atenção a qual dos
valores, ou , deve ser substituído por , para garantir
que a raiz esteja sempre dentro do intervalo atual.
As iterações também podiam ter sido feitas mais rapidamente usando um
ciclo while. Por exemplo, para encontrar a
raiz com 3 casas decimais (precisão igual a 0.0005), começando com os
mesmos valores iniciais, pode escrever-se:
(%i14)[ x1, x2 ]: [ 1.1, 1.2 ]$ (%i15) while abs (x2-x1) > 0.001 do ( xm: (x1+x2)/2, if f(x1)*f(xm) > 0 then x1: xm else x2: xm, print(xm) )$
1.15
1.125
1.1375
1.13125
1.134375
1.1328125
1.13203125
A raiz, com precisão de 3 casas decimais é 1.132. Observe-se que a
função já tinha sido definida previamente e que já estava garantido
que os sinais da função são diferentes nos dois pontos iniciais.
1.3. Método de falsa posição
No método das bissecções, se um dos valores ou
estiver muito mais próximo de zero, espera-se que a raiz também esteja
mas próxima do ponto ou em que a função está mais próxima
de zero. Como tal, será mais eficiente usar o ponto em que a
reta que passa pelos pontos (, ) e (, )
intersecta o eixo dos . Uma relação geométrica de semelhança entre
triângulos permite demonstrar que é dado pela expressão
(1.2)
O método de falsa posição é semelhante ao método de bissecções,
excepto que em vez de se usar o ponto meio de cada intervalo usa-se o
ponto definido pela equação anterior.
Exemplo 1.2
Calcule a raiz de no intervalo com
3 casas decimais, usando o método de falsa posição.
Resolução. Aproveitando que a função é a mesma que já foi
definida no exemplo da secção anterior, basta definir novamente os
valores iniciais e modificar o ciclo while
usado na secção anterior. É conveniente também guardar os valores da
função já calculados, para evitar a redundância de serem calculados
novamente a cada iteração:
Os valores da função nos dois extremos do intervalo são armazenados
nas variáveis e ; o resultado (%o17) permite
também conferir que o sinal da função muda entre e . Como
será claro nos resultados no fim deste exemplo, neste método a
distância entre e não tem que ser pequena para que o valor
esteja muito próximo da raiz. Assim sendo, a condição de paragem
já não serve e no seu lugar deve comparar-se
cada valor com o que tenha sido obtido na iteração anterior, que
representaremos por . Inicialmente pode admitir-se que e
são os próprios e .
(%i18)[ x0, xr ]: [ x1, x2 ]$
Para obter a precisão de 3 casas decimais, usa-se o comando:
Note-se que o valor da raiz com três casas decimais, 1.132, foi obtido
na quarta iteração, enquanto que no método de bisseções foram precisas
7 iterações. Neste caso foram também apresentados os valores de
e em cada iteração, para mostrar que o valor de permanece
sempre em 1.2 e, como tal, não diminui muito.
1.4. Método de aproximações sucessivas
Quando a equação pode ser escrita da forma,
(1.3)
o método de aproximações sucessivas consiste em começar com um valor
inicial e calcular a sequência , ,
… Dependendo da função e do valor inicial, em alguns casos
a sequência aproxima-se de um limite, isto é, dentro de uma tolerância
numérica dada, o valor de será igual a a partir de
algum inteiro e, nesse caso será raiz de .
Exemplo 1.3
Encontre a raiz de mais próxima de , com 3
casas decimais, usando o método de aproximações sucessivas.
Resolução. A equação pode também ser escrita:
Definindo a função e com valor inicial , os
seguintes 6 valores na sequência são:
Esta sequência não parece ser convergente. O problema neste caso é que
uma das condições para que a sequência seja convergente é que, na
vizinhança da raiz que se pretende encontrar, o declive de seja
menor que 1, que não é o que acontece neste caso:
O problema pode ser resolvido quando se consegue inverter a função
usada. Ou seja, em vez de se usar pode usar-se a equação
inversa, , que implica usar . No
Maxima, a função inversa da tangente é a
função atan. Com valor inicial , os
primeiros termos da sequência são:
Tal como no método de aproximações sucessivas, basta ter um valor
inicial para criar uma sequência que se aproxima da raiz. As vantagens
em relação ao método de aproximações sucessivas é que não é preciso
escrever a equação = 0 na forma e a sequência converge
em muitos mais casos. A desvantagem é que é preciso conhecer a
derivada, , da função .
Se é uma função contínua e derivável, o valor de
pode ser calculado, a partir do valor de , usando a série de
Taylor
(1.4)
Se for suficientemente pequeno, os dois primeiros
termos da série, apresentados na equação acima, são uma boa
aproximação para o valor da série completa. Se o ponto for
uma raiz, então = 0 e a equação anterior conduz à relação
de recorrência,
(1.5)
que permite definir uma sequência de valores que deverá
aproximar-se do valor da raiz.
Exemplo 1.4
Encontre a raiz de mais próxima de , com 3
casas decimais, usando o método de Newton.
Resolução. A função já foi definida no comando
(%i2) mas como é necessário também definir a sua derivada,
vamos defini-la novamente usando o
comando define, que é mais apropriado para
definir funções matemáticas:
A diferença entre define
e :=, é que no primeiro caso o argumento
dado ao comando é avaliado imediatamente; neste caso, a derivada é
realizada antes de proceder à definição da função. Se tivéssemos usado
:= para definir a derivada , a
função diff não seria executada
imediatamente, ficando no argumento da função; quando quisermos
calcular, por exemplo, , o valor 1.2 seria substituído no
comando diff
ficando diff(f(1.2), 1.2) que produz erro,
porque diff espera que o segundo
argumento seja uma variável, e não um número.
Usando o valor inicial , os seguintes 6 valores na sequência
são:
Note-se a rapidez com que o método converge; após apenas 3 interações
já se obtêm 4 casas decimais para a raiz e após a quinta iteração já é
obtida a solução com o número máximo de casas decimais (15) que é
possível obter com o formato de dupla precisão numérica usado pela
função float.
1.6. Sistemas de equações transcendentes
O método de Newton pode ser generalizado facilmente para
resolver um sistema de variáveis com equações
contínuas e deriváveis. Por exemplo, no caso de duas equações
com duas variáveis, = 0 e = 0, os primeiros
termos nas séries de Taylor para as duas funções são:
(1.6)
Os índices nas derivadas indicam que e devem ser
substituídas por (, ). Substituindo e
e escrevendo o sistema de forma matricial,
obtém-se,
(1.7)
onde é a matriz
jacobiana:
(1.8)
calculada em e . As matrizes ,
e são:
(1.9)
A equação (1.7) permite definir a relação de
recorrência para e ,
(1.10)
onde é a matriz inversa da matriz jacobiana.
Exemplo 1.5
Encontre os pontos de intersecção da circunferência com a
hipérbole .
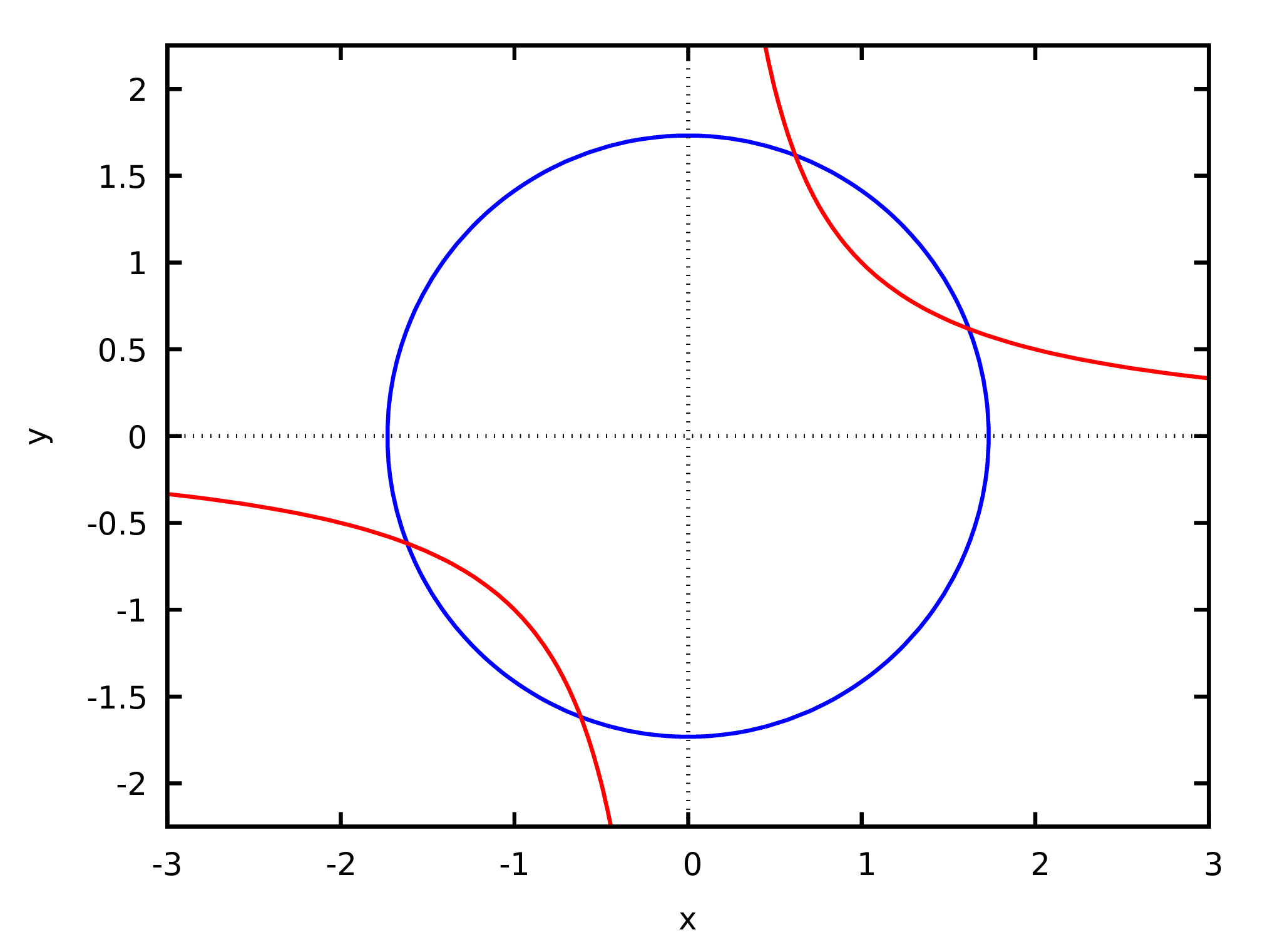
Resolução. Os gráficos da circunferência e da hipérbole podem
ser traçados com o comando:
Figura 1.2: Gráficos da circunferência e a
hipérbole .
O gráfico (Figura 1.2) mostra que existem
quatro pontos de intersecção, simétricos em relação às retas .
Basta encontrar um desses quatro pontos, por exemplo, o que está
mais próximo do ponto inicial , . Escrevendo as duas
equações da forma e , as duas funções são
definidas pelas expressões,
(%i32)[f, g]: [x^2+y^2-3, 1-x*y]$
A matriz jacobiana calcula-se no Maxima usando a
função jacobian, à qual há que dar a
lista de expressões a derivar, e a lista das variáveis. A inversa da
matriz jacobiana pode ser calculada com a
função invert. Vamos definir uma função
que calculará o produto
na equação (1.10),
para valores dados de e :
A matriz da equação (1.9) foi dada como uma lista, em vez
duma matriz coluna, mas o Maxima interpreta o produto de matriz por
lista como um produto de matriz por matriz coluna (o ponto entre a
matriz e a lista indica produto matricial). O produto da inversa da
matriz jacobiana vezes essa lista é uma matriz com uma linha e duas
colunas, mas como é mais fácil trabalhar com listas, foi usado o
comando list_matrix_entries para converter
essa matriz numa lista. Como tal, dados os valores de e , a
função produz uma lista com dois valores que subtraídos a
e , dão os valores de e de acordo com a
equação (1.10).
Com valores iniciais e , vamos realizar 6 iterações:
Tendo em conta a simetria das soluções, as quatro soluções (, )
são então: (0.6180, 1.6180), (1.6180, 0.6180), (-0.6180, -1.6180) e
(-1.6180, -0.6180).