Exercícios Resolvidos de Dinâmica e Sistemas Dinâmicos
Jaime E. Villate. Universidade do Porto, Portugal,
ISBN: 978-972-752-273-6, DOI: 10.24840/978-972-752-273-6, 2021.
10. Sistemas não lineares
Problema 1
Uma partícula com massa
, desloca-se ao longo do eixo dos
sob a
ação de uma força resultante
que depende da posição
e da
componente da velocidade
. Para cada um dos casos seguintes
encontre os pontos de equilíbrio, diga que tipo de ponto equilíbrio é
cada um (estável ou instável; centro, foco, nó ou ponto de sela) e
desenhe o retrato de fase mostrando as órbitas mais importantes:
(a)
(b)
As equações de evolução são:
(a) Nos pontos de equilíbrio,
e
, ou seja,
existe um único ponto de equilíbrio em
. A matriz jacobiana
é:
E a matriz da aproximação linear na vizinhança do ponto de equilíbrio é:
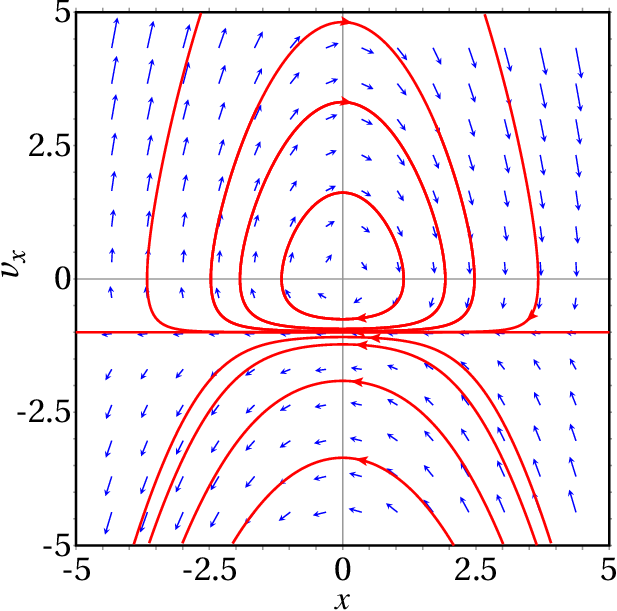
Que tem traço nulo e determinante (positivo) igual a 1. Como tal, o ponto
de equilíbrio poderá ser centro ou foco (na aproximação linear não há dúvida
que é centro, mas devido aos termos não lineares um centro pode tornar-se
foco; deverá ser conferido no retrato de fase). O retrato de fase traça-se
com o comando:
A amplitude de oscilação de um pêndulo decresce, devido à força de
resistência do ar e ao atrito no eixo. Admita um pêndulo de
comprimento
cm e massa
kg, em que o atrito no
eixo é desprezável mas a resistência do ar não. A equação de movimento
é a equação 8.8
Se a massa
estiver concentrada numa esfera de raio
cm, a
expressão para a constante
é dada pela equação 4.14:
, onde
kg/m3 é a massa
volúmica do ar. Trace os gráficos de
,
e da
curva de evolução no espaço de fase e explique o significado físico da
solução, para os dois casos seguintes:
(a) O pêndulo parte do repouso com um ângulo inicial
.
(b) O pêndulo é lançado desde
, com
velocidade angular inicial
s−1.
(a) Usando o programa rk, com intervalos de
tempo de 0.1, desde
até
,
Que é um resultado convergente com 4 algarismos significativos. O gráfico do
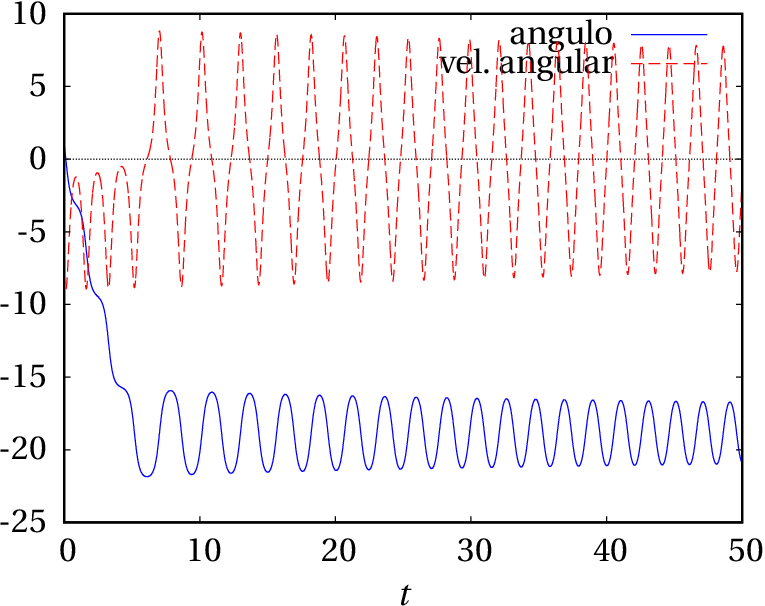
ângulo e da velocidade angular, em função do tempo, obtém-se com o comando:
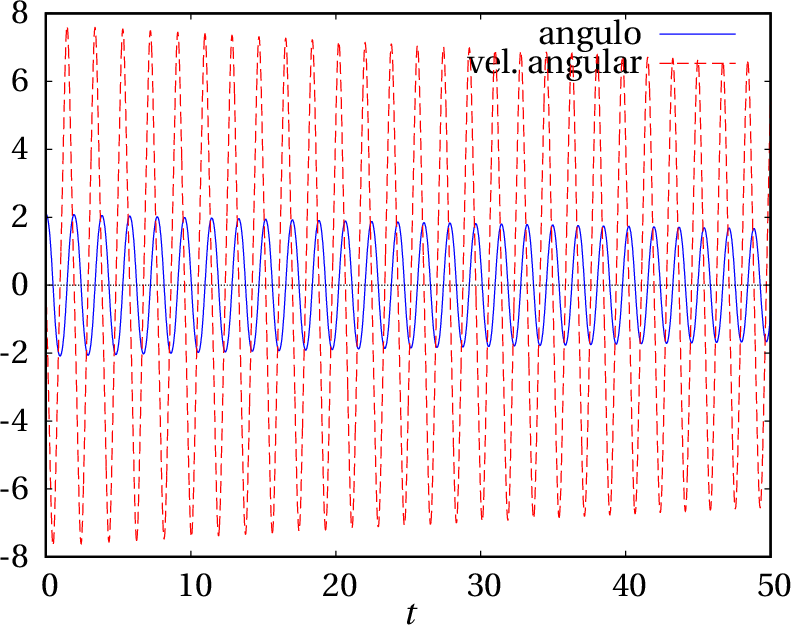
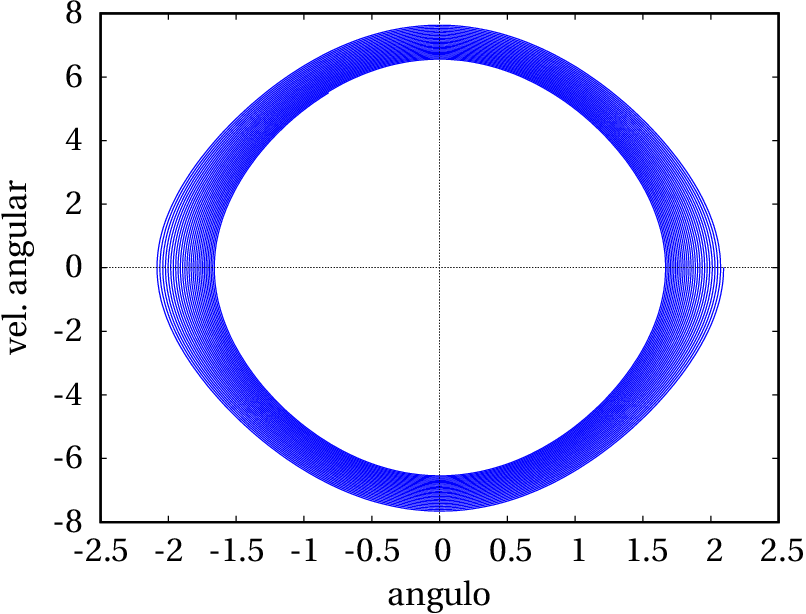
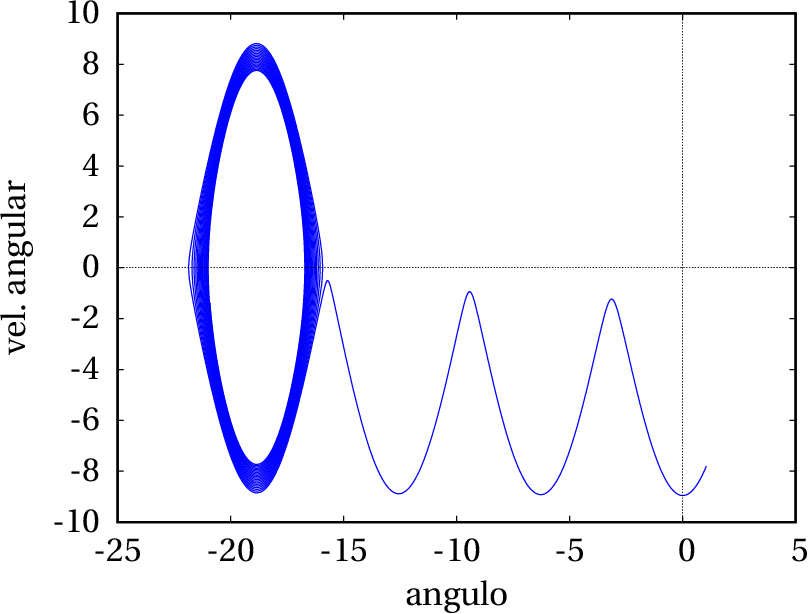
Os gráficos do ângulo e da velocidade angular, em função do tempo, e da
curva de evolução no espaço de fase, obtêm-se repetindo os mesmos comandos da
alínea anterior:
O pêndulo roda três voltas completas, no sentido horário, e quando passa a
quarta vez pela posição de equilíbrio estável, começa a oscilar com
amplitude que decresce lentamente.
Problema 7
Para analisar a equação diferencial não linear
,
(a) Escreva as equações de evolução do sistema dinâmico
associado à equação.
(b) Encontre os pontos de equilíbrio do sistema.
(c) Determine a matriz jacobiana.
(d) Caracterize cada um dos pontos de equilíbrio.
(e) Se em
os valores da variável
e da sua derivada
são
e
, determine (numericamente) os valores da
variável e da sua derivada em
.
(a) Define-se uma segunda variável de estado:
e substitui-se na equação do sistema:
Como tal, as duas equações de evolução — expressões das derivadas das
duas variáveis de estado — são:
(b) Para resolver esta alínea não é necessário ter resolvido a alínea
anterior. Basta observar que nos pontos de equilíbrio
permanece constante
e, assim sendo,
. Substituindo na equação do sistema,
(c) Usando as equações obtidas na alínea (a),
(Também pode usar-se a função jacobian do Maxima,
para determinar a matriz).
(d) Substituindo
e
na matriz jacobiana obtém-se:
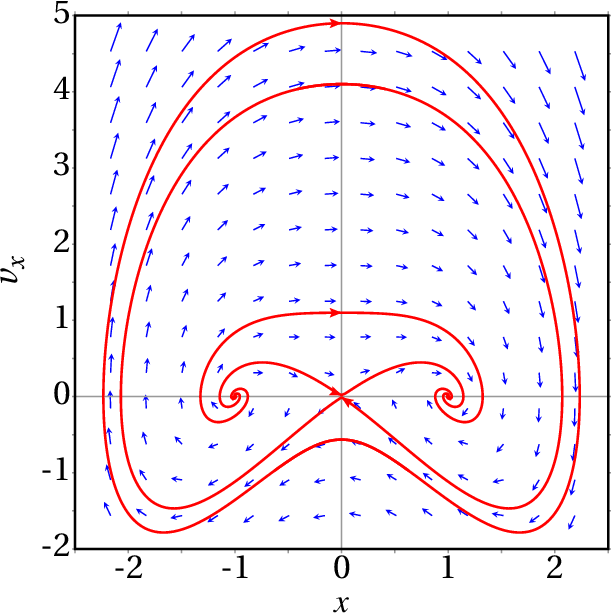
Como o traço dessa matriz é nulo e o determinante é 8, os valores próprios
são números imaginários e o ponto
,
é um centro ou foco
(o retrato de fase mostra que é centro).
Substituindo
e
na matriz jacobiana obtém-se:
Como o traço dessa matriz é nulo e o determinante é -8, os valores próprios
são reais, com sinais opostos. O ponto
,
é então ponto de sela.
(e) Usa-se a função rk do Maxima várias
vezes, com valores decrescentes dos intervalos de tempo, até se obterem
valores convergentes do resultado:
Ou seja, os valores aproximados de
e
, em
, são: 0.5869 e
0.8277.
Problema 8
O sistema dinâmico com equações de evolução:
tem um único ponto de equilíbrio na origem. A matriz jacobiana nesse
ponto é igual a zero e, portanto, os valores próprios (nulos) não
podem ser usados para caraterizar o ponto de equilíbrio. Use o
seguinte método para analisar o retrato de fase do sistema:
(a) Determine o versor na direção da velocidade de fase em
qualquer ponto do eixo dos
e em qualquer ponto do eixo dos
.
(b) Determine o versor na direção da velocidade de fase em
qualquer ponto das duas retas
e
.
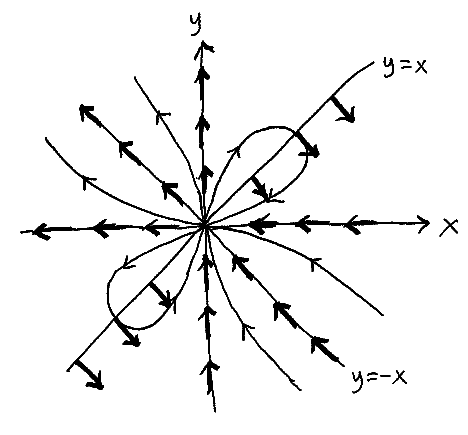
(c) Faça a mão um gráfico mostrando os versores que encontrou
nas alíneas a e b, em vários pontos nos 4 quadrantes do
espaço de fase, e trace algumas curvas de evolução seguindo as
direções da velocidade de fase. Com base nesse gráfico, que tipo de
ponto de equilíbrio julga que é a origem?
(d) Diga se existem ciclos, órbitas homoclínicas ou
heteroclínicas e, caso a resposta seja afirmativa, quantas.
(a) No eixo dos
,
é igual a zero e a velocidade de fase é,
No eixo dos
,
é igual a zero e a velocidade de fase é,
(b) Na reta
=
, a velocidade de fase é,
com módulo igual a
e versor:
Na reta
,
(c) A figura seguinte mostra os versores encontrados nas duas
alíneas anteriores e algumas curvas de evolução. Como há curvas que se
aproximam da origem e curvas que se afastam dele, a origem é ponto de
sela.
(d) Não existem ciclos nem órbitas heteroclínicas. Existem um número
infinito de órbitas homoclínicas: todas as curvas de evolução no primeiro e
terceiro quadrantes são órbitas homoclínicas.
Problema 10
Qualquer corpo celeste (planeta, cometa, asteroide, sonda espacial,
etc) de massa
no sistema solar tem uma energia potencial gravítica
produzida pelo Sol, que é responsável pelas órbitas elípticas desses
corpos. A expressão para a energia potencial é,
onde
é a constante de gravitação universal,
é a massa do Sol,
e as coordenadas
e
são medidas no plano da órbita do corpo
celeste, com origem no Sol. Se as distâncias forem medidas em unidades
astronómicas, UA, e os tempos em anos, o produto
será igual a
.
(a) Encontre as equações de movimento do corpo celeste, em
unidades de anos para o tempo e UA para as distâncias.
(b) O cometa Halley aproxima-se até uma distância mínima do Sol
igual a 0.587 UA. Nesse ponto, a sua velocidade é máxima, igual a
11.50 UA/ano, e perpendicular à sua distância até o Sol. Determine
numericamente a órbita do cometa Halley, a partir da posição inicial
, com velocidade inicial
,
com intervalos de tempo
anos. Trace a órbita desde
até
anos. Que pode concluir acerca do erro numérico?
(c) Repita o procedimento da alínea anterior com
anos e trace a órbita desde
até
anos. Que pode concluir acerca do erro numérico?
(d) Diga qual é, aproximadamente, a distância máxima que o
cometa Halley se afasta do Sol, e compare a órbita do cometa com as
órbitas do planeta mais distante, Neptuno (órbita entre 29.77 UA e
30.44 UA) e do planeta mais próximo do Sol, Mercúrio (órbita entre
0.31 UA e 0.39 UA. Plutão já não é considerado um planeta).
(a) Há quatro variáveis de estado:
,
,
e
.
As expressões das energias cinética e potencial são:
Onde xp e yp representam as velocidades generalizadas
e
.
Para aplicar as equações de Lagrange é necessário definir xp e yp como
derivadas
e
em ordem ao tempo, e definir também xpp e ypp como
derivadas de xp e yp:
(b) Usando as condições iniciais dadas e o intervalo de tempo desde
0 até 100, com incrementos de 0.05, a solução numérica do problema obtém-se
com o programa rk:
onde o é uma lista com várias listas de cinco elementos, com os valores de
(
,
,
,
,
) em diferentes instantes entre 0 e 100.
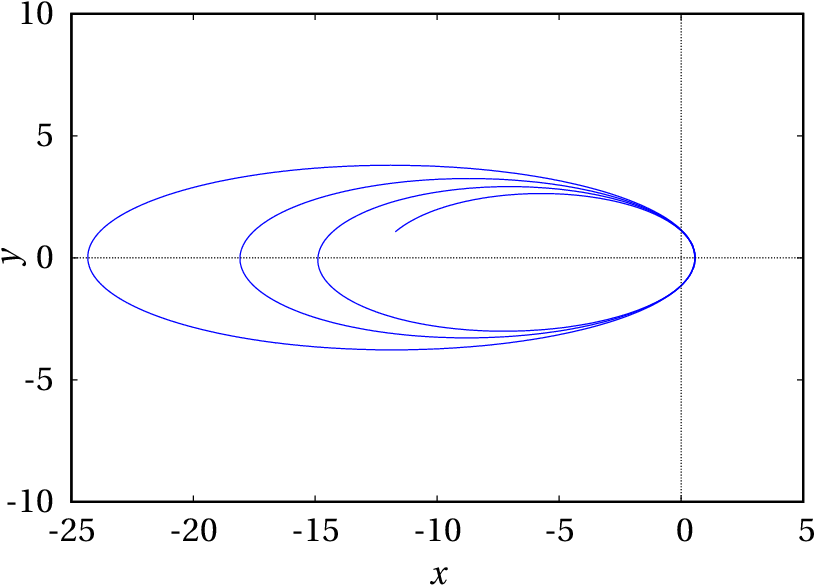
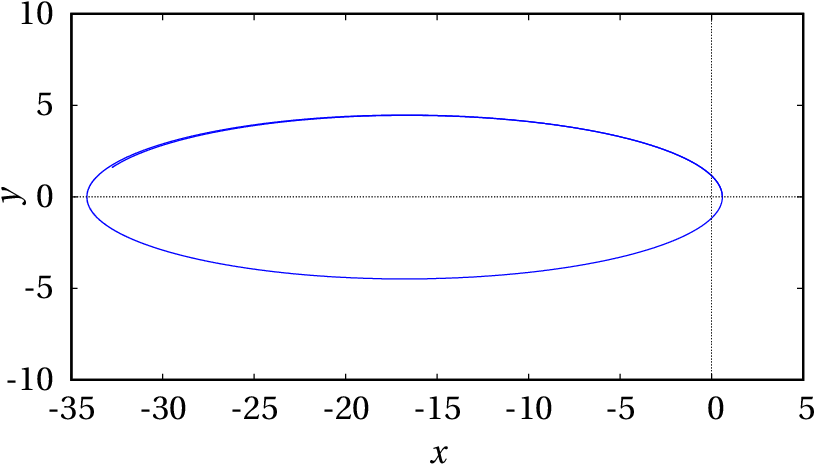
Como tal, o gráfico de trajetória do cometa (
vs
) pode ser obtido
com o seguinte comando:
Usou-se a opção same_xy para que a escala nos dois
eixos seja igual, mostrando a forma real da trajetória. O resultado é o
gráfico seguinte:
O facto de que o satélite não repete a mesma trajetória, mas aproxima-se
cada vez mais do Sol, indica que a sua energia mecânica diminui, em vez
de permanecer constante, como era suposto acontecer. Conclui-se então que
o intervalo
não é suficientemente pequeno e o resultado
obtido têm erro numérico muito elevado.
Mostra que o cometa está mais afastado do Sol em
aproximadamente 36 anos.
Como foram usados incrementos de
iguais a 0.02 = 1/50, 36 anos aparecerá
na posição 1801 da lista. Observando a lista de valores de
nessa parte
da lista:
(%i31) makelist (o[i][2], i, 1780, 1820);
Conclui-se que o valor mínimo de
(distância máxima ao Sol) é
aproximadamente 34.14 UA. Essa distância máxima é maior do que a órbita
de Neptuno e a distância mínima, 0.587 UA, está entre as órbitas de Mercúrio
e Vénus.