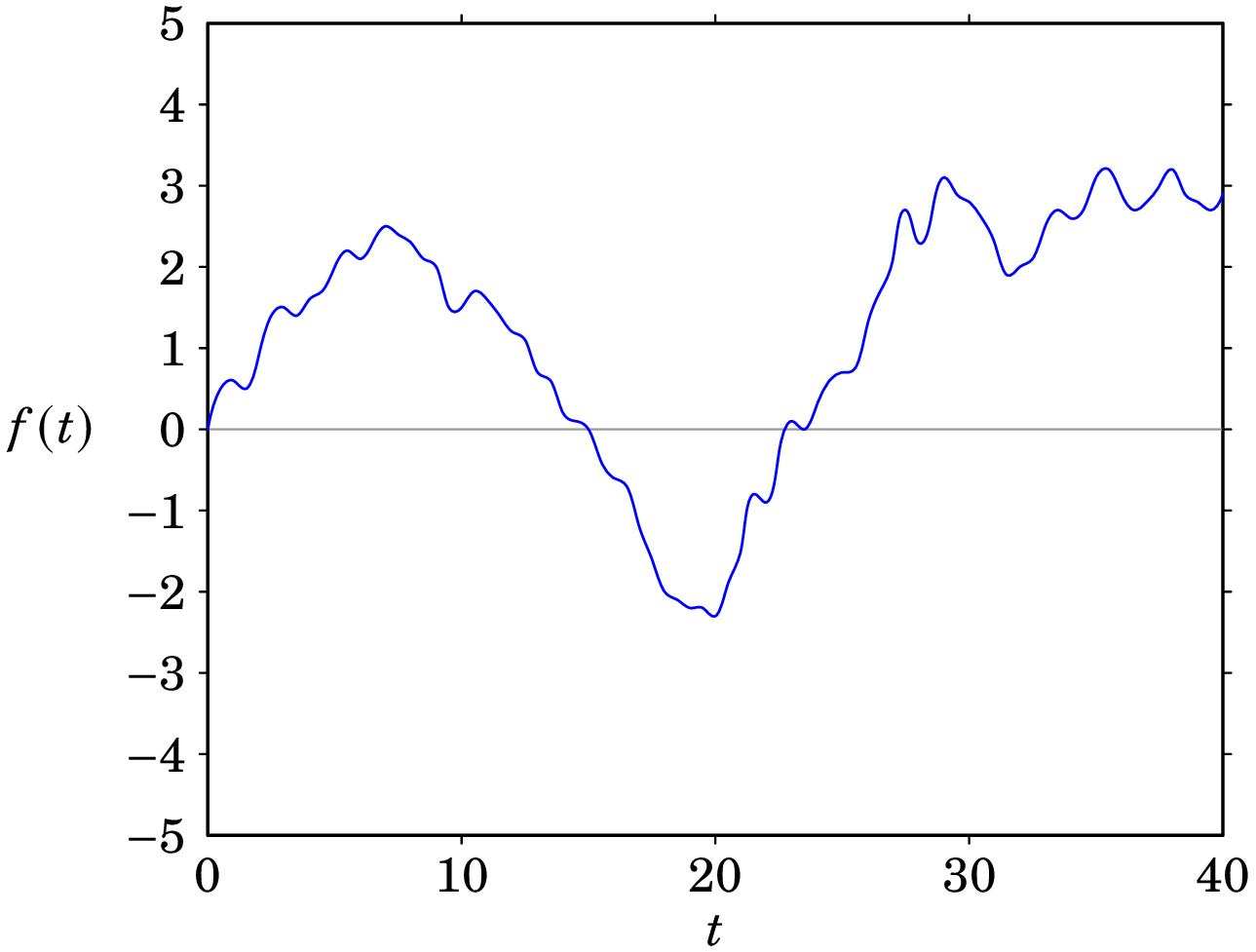
Uma função oscilatória é uma função do tempo , contínua, que
varia entre dois valores limites, como no gráfico da figura
3.1, que pode representar o registo das vibrações num
sismógrafo, ou um sinal elétrico num circuito, ou as variações de
temperatura em torno de um valor médio, etc.
Figure 3.1: Função oscilatória.
A função oscilatória pode ser periódica, quando a oscilação
durante um intervalo (período) repete-se indefinidamente. Nesse caso,
a função pode ser decomposta numa série de Fourier, que é
uma soma de funções seno e cosseno. Na secção seguinte estudaremos
essas oscilações elementares em que é uma função seno ou
cosseno.
3.2. Oscilações harmónicas
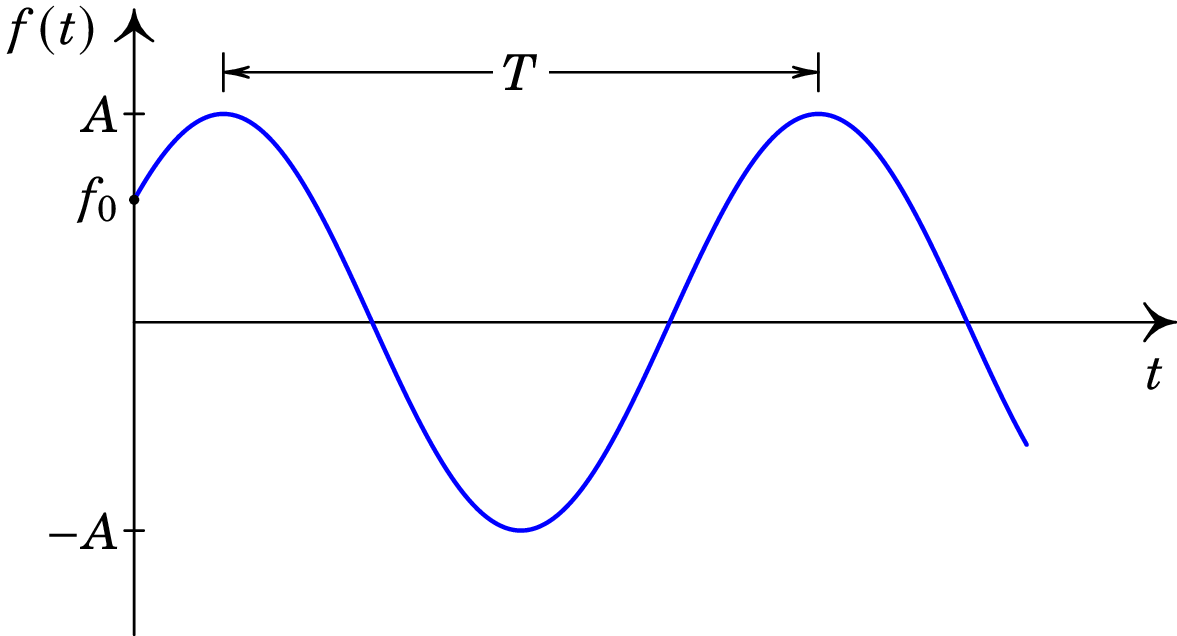
A oscilação periódica mais simples é quando a função oscilatória tem a
forma de uma função seno:
(3.1)
A amplitude é o valor máximo da função; o valor mínimo é
. a constante é a frequência angular, e
é a fase inicial. A figura
3.2 mostra o gráfico da função. O tempo
entre dois instantes sucessivos em que a função tem o seu valor máximo
é o período de oscilação.
Figure 3.2: oscilação harmónica.
A variação do argumento da função seno durante um período é
, que deverá ser igual a radianos. Como tal, a
relação entre o período e a frequência angular é a seguinte:
(3.2)
A frequência é o número de oscilações por unidade de
tempo, igual ao inverso do período:
(3.3)
No instante inicial , o valor da função é
e assim, a fase inicial é o arco seno da relação entre o valor inicial
da função e a amplitude:
(3.4)
3.3. Movimento harmónico simples
Um objeto tem movimento harmónico simples quando se desloca ao longo
de um eixo, por exemplo o eixo , de forma que a sua posição em
função do tempo é uma função harmónica:
(3.5)
A velocidade instantânea, derivada da posição em ordem ao tempo, é:
(3.6)
E consequentemente, em qualquer instante a seguinte expressão
permanece constante, igual ao quadrado da amplitude:
(3.7)
em particular, no instante inicial a expressão anterior permite
determinar a amplitude em função da posição incial , e da
velocidade incial :
(3.8)
e a fase inicial é o arco seno da posição inicial sobre a
amplitude:
(3.9)
3.4. Vetores de rotação
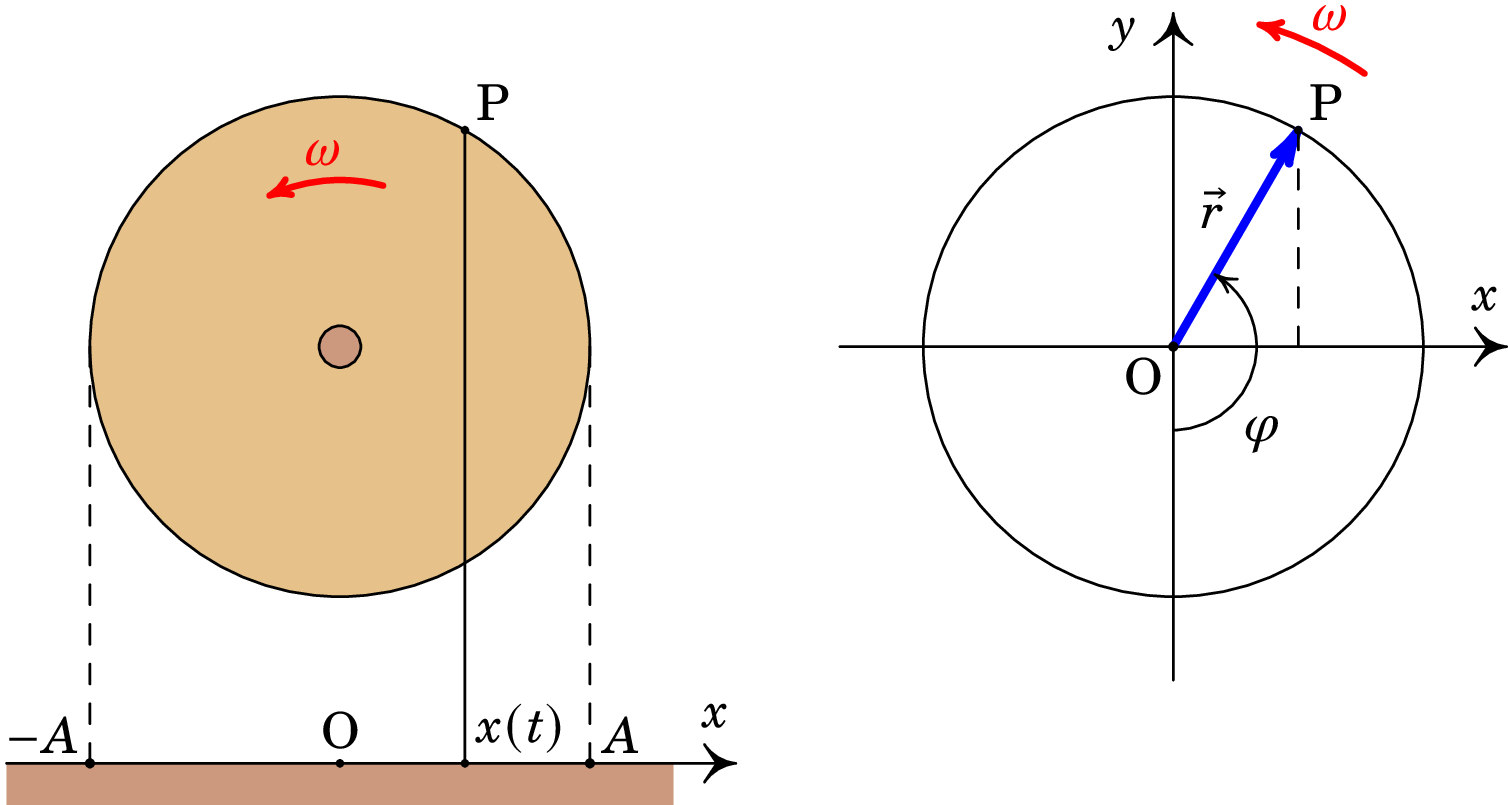
O movimento harmónico simples pode ser visualizado como a projeção de
um movimento circular uniforme. O lado esquerdo da figura
3.3 mostra uma roda, de raio , que
roda em torno do seu eixo com velocidade angular , constante,
no sentido contrário ao movimento dos ponteiros do relógio.
Figure 3.3: Projeção de um movimento circular uniforme num eixo.
Na periferia da roda há um pino P. A projeção da posição do pino no
plano horizontal desloca-se entre dois pontos à distância da
projeção do eixo da roda no ponto O. Num eixo com origem no ponto
O e na direção do movimento da projeção de P, a posição da projeção de
P é dada pela função , que verifica a equação (3.5)
do movimento harmónico simples.
Se colocarmos o eixo passando pelo centro da roda (lado direito da figura
3.3), o vetor , desde a origem O
até o ponto P, tem módulo igual a e componentes:
(3.10)
onde o ângulo é o ângulo que o vetor faz com o semieixo
negativo. A velocidade angular do ponto P é , constante,
igual à derivada do ângulo em ordem ao tempo. Como tal,
é a primitiva de que em tem o valor inicial
:
(3.11)
e a componente do vetor é a expressão (3.5) do
movimento harmónico simples.
Se em vez do ângulo usarmos o ângulo que o vetor
faz com o semieixo positivo, a expressão do vetor
será,
(3.12)
e o movimento harmónico no eixo dos que é a componente desse
vetor é igual a:
(3.13)
Como tal, o movimento harmónico pode ser representado por uma função
seno ou cosseno, com fases iniciais diferentes. Também é possível
fazer com que a fase inicial seja nula, mudando a origem da variável
. No caso da equação (3.5), se for escolhido como
o instante em que é igual a zero e está a aumentar, então
; e no caso da equação (3.13), se for o
instante em que tem o seu valor máximo, .
3.5. Sobreposição de movimentos harmónicos perpendiculares
Consideremos uma partícula que se desloca no plano de forma que
as duas componentes e da posição são ambas funções
harmónicas. Começaremos por considerar ambas funções com a mesma
frequência angular , mas com amplitudes e
diferentes. O tempo pode ser contado a partir do instante em que
tem o seu valor máximo, e nesse instante admitimos que não tem o
seu valor máximo. Assim, as coordenadas da posição da partícula em
função do tempo são:
(3.14)
Vejamos como será a trajetória da partícula para alguns valores do
desfasamento entre os dois movimentos harmónicos.
1. Quando os dois movimentos estão em fase, , a
relação entre as componentes e é constante e igual à relação
entre as amplitudes:
(3.15)
que é a equação de uma reta que passa pela origem, com declive
positivo . Mas como varia entre e , a trajetória é um
segmento de reta entre os pontos e .
2. Quando o desfasamento é , a componente
é:
(3.16)
e obtemos a seguinte relação:
(3.17)
que é a equação de uma elipse. A trajetória da partícula é uma elipse,
com centro na origem e semieixos de comprimentos e , nas
direções e .
Em , tem o seu valor máximo e é igual a zero; a
partícula encontra-se no semieixo positivo . Um instante mais
tarde tanto como diminuem. Como tal, a partícula passa para o
quarto quadrante. Isso indica que a elipse é percorrida no sentido dos
ponteiros do relógio.
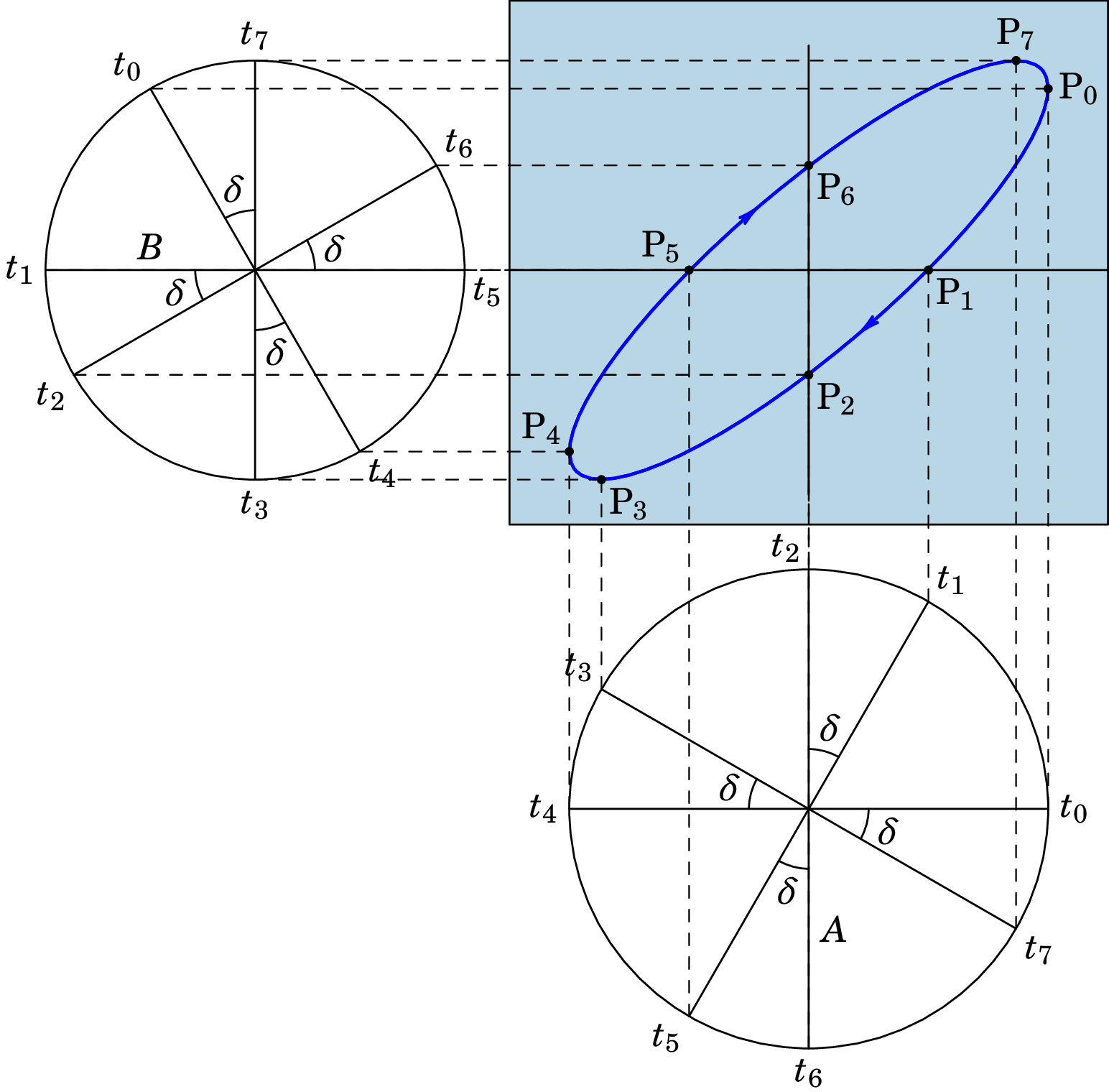
3. Se , as coordenadas cartesianas da
posição são dadas pela equação (3.14).
Usaremos o método dos vetores de rotação para determinar a
trajetória. A figura 3.4 mostra os vetores de rotação
dos dois movimentos, com módulos e , em oito instantes ,
,…, .
Figure 3.4: Sobreposição de movimentos harmónicos perpendiculares.
No instante inicial, , o vetor correspondente à coordenada
encontra-se na sua posição máxima, enquanto que o vetor
correspondente à coordenada já rodou um ângulo em relação
à sua posição máxima; a partícula encontra-se no ponto
, de coordenadas e .
Em , passa pelo ponto com coordenadas
e , no semieixo positivo . Assim
sucessivamente, até chegarmos ao instante em que a partícula
atravessa o semieixo positivo ; nesse instante, e a
coordenada onde a partícula cruza o semieixo positivo é
. Em , a coordenada da partícula tem o seu
valor máximo . Comparando as coordenadas dos
pontos e , temos que
. Como tal, o desfasamento entre os dois
movimentos harmónicos pode ser determinado a partir da relação entre
e :
(3.18)
4. Se , obtém-se uma trajetória
elíptica semelhante à da figura 3.4, mas inclinada de
forma que o eixo maior tem declive negativo, e a elipse é percorrida
no sentido oposto ao movimento dos ponteiros do relógio. Em função da
coordenada , onde a partícula atravessa o semieixo positivo,
e o valor máximo da coordenada , o ângulo de desfasamento é igual
a:
(3.19)
Quando as frequências dos dois movimentos harmónicos são diferentes,
mas a relação entre elas é um número racional, a trajetória da
partícula é uma curva conhecida como figura de Lissajous. O
exercício 3.3 mostra uma dessa figuras, no caso em que
uma das frequências é o dobro da outra.
3.6. Dinâmica do movimento harmónico simples
A expressão da aceleração correspondente ao movimento harmónico simples
(3.5) é a derivada da expressão (3.6) da
velocidade, que conduz a:
(3.20)
Esta é a mesma função da posição, multiplicada por uma
constante:
(3.21)
Como a aceleração é a segunda derivada da posição em ordem ao
tempo, esta expressão da aceleração implica a seguinte equação
diferencial:
(3.22)
A solução geral desta equação diferencial é a função (3.5),
com duas constante e que dependem das condições
iniciais, de acordo com as equações (3.8) e
(3.9).
Usando a segunda lei de Newton, para produzir a aceleração
(3.21) a força resultante sobre o objeto deverá ser:
(3.23)
onde é a massa do objeto. Este tipo de força é conhecida como
força restauradora. A posição corresponde a um ponto de
equilíbrio estável. Como a força resultante é nula nesse ponto, o
objeto pode permanecer em repouso nessa posição. Se o objeto se
afastar desse ponto, no sentido positivo de , a força no sentido
oposto faz com que regresse à posição . E se o objeto se afastar
no sentido negativo de , a força será então no sentido positivo
fazendo novamente com que o objeto regresse à posição de equilíbrio.
Em qualquer sistema em que a força resultante for da forma
(3.23), o movimento será harmónico simples, com frequência
angular . E qualquer sistema em que existe uma função do tempo
que verifica uma equação da forma da equação diferencial
(3.22), essa função será uma oscilação harmónica simples
com frequência angular .
3.7. Molas elásticas
Uma mola elástica, quando tem o seu comprimento normal, não exerce
nenhuma força. Quando a mola é comprimida ou distendida, esta exerce uma força
diretamente proporcional à distância que foi comprimida ou distendida,
e essa força é no sentido que faz a mola recuperar o seu comprimento
normal.
A figura 3.5 mostra uma mola que foi pendurada de
um suporte fixo. Se definirmos o eixo na direção vertical, no
sentido para cima, e com origem na posição em que o extremo livre da
mola está na posição em que a mola tem o seu comprimento normal, a
força exercida pela mola é na direção do eixo e com valor:
(3.24)
onde é a posição do extremo livre da mola, e é a
constante elástica da mola.
Figure 3.5: Massa pendurada de uma mola elástica.
A seguir, penduramos um pequeno cilindro de massa do extremo livre
da mola. Sobre o cilindro atuam duas forcas, o seu peso ,
no sentido negativo do eixo (para baixo) e a força exercida pela mola:
(3.25)
A posição de equilíbrio, em que o cilindro pode permanecer em repouso,
corresponde ao valor que faz com que a força
(3.25) seja nula:
(3.26)
O sinal negativo indica que a mola está esticada e o seu extremo
desceu da posição em que a mola tem o seu comprimento normal. Para que
o ponto de equilíbrio esteja na origem da coordenada de posição,
introduzimos uma variável , medida também na vertical e para cima,
definida por:
(3.27)
e com essa substituição de variável, a força resultante
(3.25) fica igual a:
(3.28)
Esta força tem a forma geral da força restauradora (3.23), em
que a frequência angular é:
(3.29)
Se o cilindro for deslocado da sua posição de equilíbrio, ,
começará a oscilar com movimento harmónico simples:
(3.30)
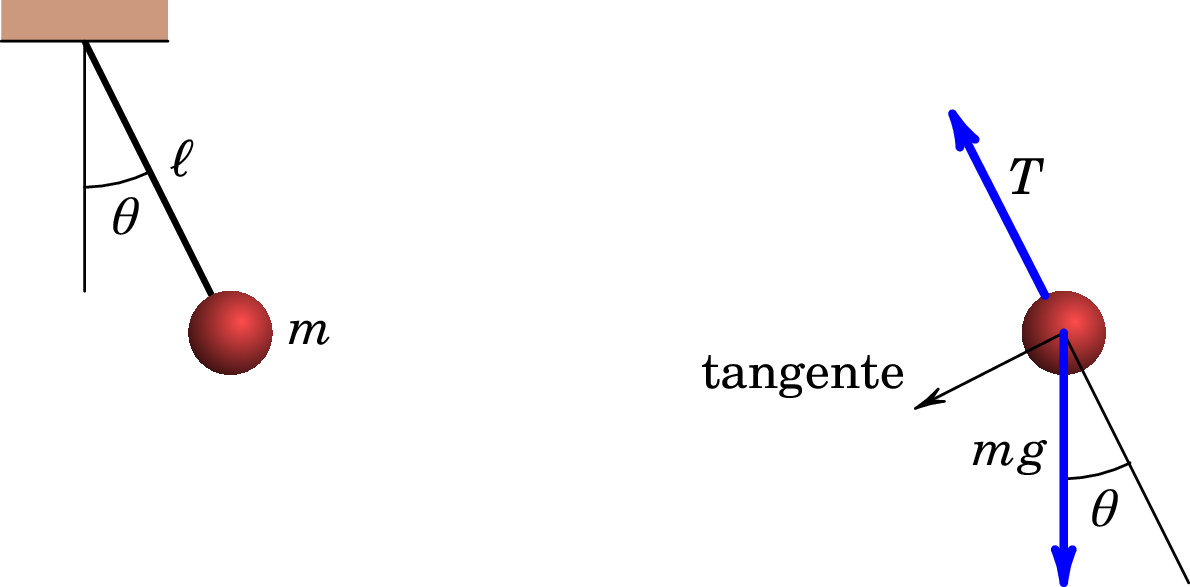
3.8. O pêndulo simples
Um pêndulo simples é um pequeno objeto de massa , pendurado de um
fio de comprimento , que pode oscilar num plano vertical (figura
3.6).
Figure 3.6: Pêndulo simples e diagrama de forças.
Desprezando a resistência do ar e a massa do fio, as duas forças que
atuam sobre o objeto de massa são o seu peso e a tensão no fio. O
lado direito da figura 3.6 mostra essas duas forças e a
direção tangente à trajetória, que é circular e de raio . A
única força na direção tangencial é a componente do peso nessa
direção, , em que é o ângulo que o fio do
pêndulo faz com a vertical.
No movimento circular, o módulo da velocidade é igual ao raio, ,
vezes a velocidade angular , que é a derivada do ângulo
em ordem ao tempo:
(3.31)
A aceleração tangencial é igual à derivada do módulo da velocidade
em ordem ao tempo:
(3.32)
E a segunda lei de Newton implica que a aceleração tangencial também
deverá ser igual à força tangencial dividida pela massa:
(3.33)
onde o sinal negativo é porque se for positivo,
também será positivo e a componente tangencial do peso faz diminuir
(ver figura 3.6); e se for negativo,
também será negativo e a componente tangencial do peso faz
aumentar .
Igualando as duas expressões (3.32) e (3.33),
obtemos a equação diferencial do pêndulo:
(3.34)
Se o ângulo , em radianos, for suficientemente pequeno,
será aproximadamente igual a ; por exemplo, a
diferença entre e é de 0.5% se
, de 2% se , e de 4.5% se
. Com essa aproximação, a equação (3.34)
pode ser escrita:
(3.35)
que é a equação diferencial (3.22) de um oscilador
harmónico simples com frequência angular:
(3.36)
A solução para o ângulo em função do tempo é então a expressão
do oscilador harmónico simples:
(3.37)
O período do pêndulo simples é:
(3.38)
Como o valor da aceleração da gravidade é diferente em diferentes
locais, usaremos aqui o seu valor padrão, com 4 algarismos
significativos:
(3.39)
que é uma boa aproximação ao valor real de em latitudes próximas
de .
Exercícios resolvidos
3.1
Um ponto luminoso no ecrã de um osciloscópio oscila na vertical,
com movimento harmónico simples de frequência 1.5 Hz. O comprimento
do segmento vertical que o ponto descreve é 10 cm. Determine:
(a) a sua frequência angular, (b) o seu período e
(c) a sua velocidade máxima.
Resolução. (a) A frequência angular é igual a
vezes a frequência:
(b) O período é o inverso da frequência:
(c) A amplitude do movimento é 5 cm, e a velocidade máxima é
igual à amplitude vezes a frequência angular:
3.2
Quando um cilindro de 50 g é pendurado duma mola elástica, tal
como na figura 3.5, a mola alonga-se 16
cm. (a) Determine a constante elástica da mola. (b)
Calcule o período de oscilação do sistema. (c) Se o cilindro
é deslocado 5 cm por baixo da posição de equilíbrio e a seguir
deixa-se oscilar livremente, determine a velocidade máxima no seu
movimento oscilatório.
Resolução. (a) Na posição de equilíbrio, o peso do
cilindro, N, é igual à força elástica da
mola, , onde m é o alongamento da
mola. Como tal, a constante elástica é:
(b) O período de oscilação é:
(c) A expressão da posição em função do tempo, em unidades SI,
é:
e a expressão da velocidade é a derivada em ordem a :
a velocidade máxima é 15.3 cm/s.
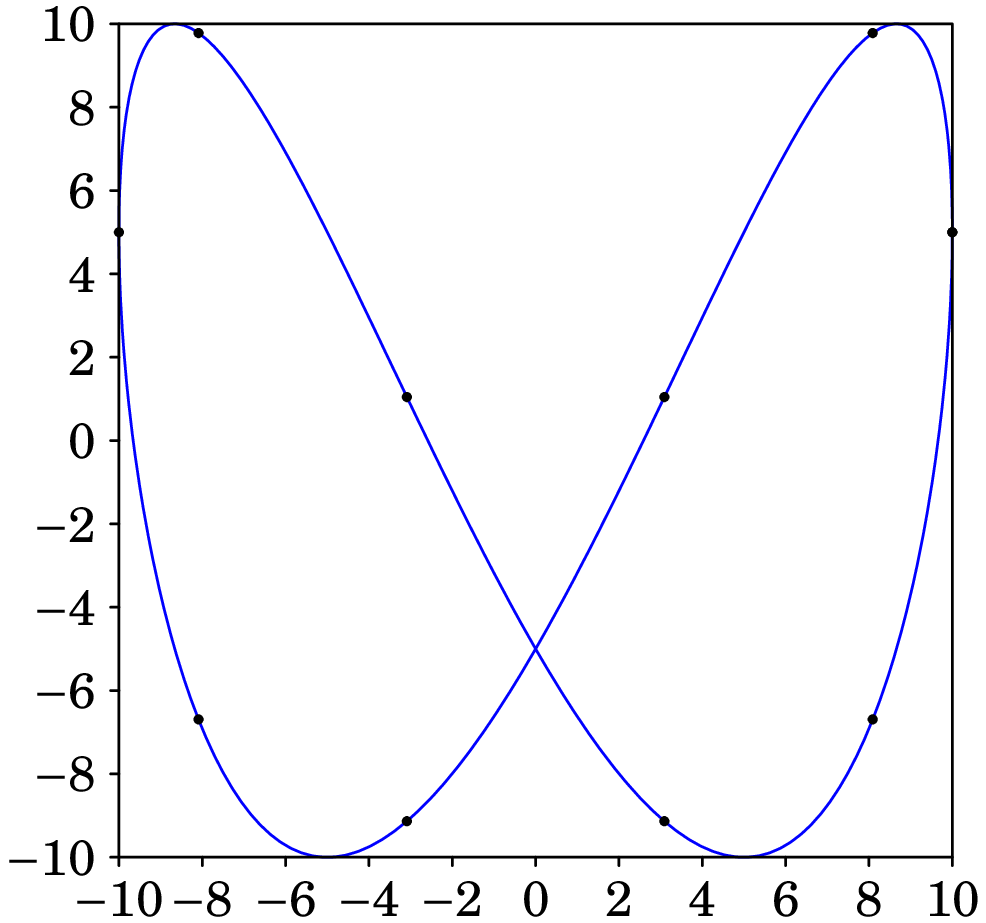
3.3
Trace a figura de Lissajous correspondente
aos movimentos harmónicos:
Resolução. Os períodos dos dois movimentos harmónicos são:
O período da trajetória é então 0.4 s. A seguinte tabela mostra os
valores calculados de e para entre 0 e , com
intervalos de :
Com essas coordenadas e , e tendo em conta que os valores
mínimos de e devem ser e os valores máximos 10,
obtém-se o seguinte gráfico:
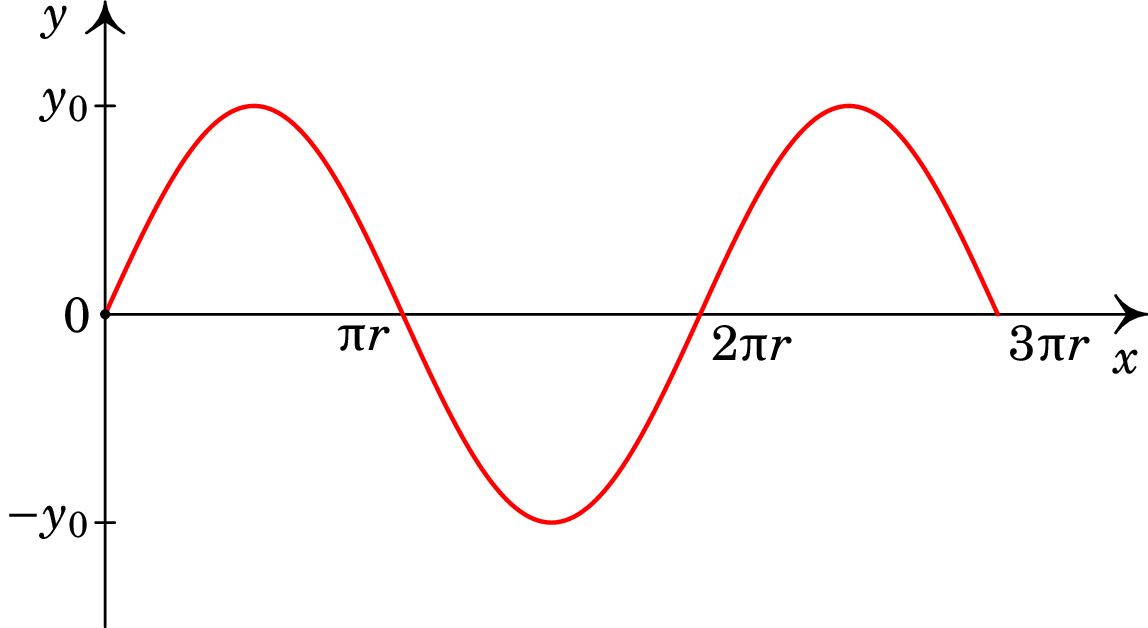
3.4
Uma partícula move-se de tal forma que as suas coordenadas como
funções do tempo são dadas por e
. (a) Represente graficamente a
trajetória da partícula. (b) Que força é necessária para
produzir este movimento? (c) Calcule os valores da velocidade
e da aceleração como funções do tempo.
Resolução. (a) A trajetória da partícula é o gráfico
de em função de . Substituindo na expressão de
obtemos:
O gráfico seguinte mostra essa trajetória, entre e ,
onde .
(b) As componentes da velocidade, derivadas das coordenadas
e em ordem ao tempo, são:
e as componentes da aceleração, derivadas das componentes da
velocidade em ordem ao tempo, são:
A força tem unicamente componente , igual à massa vezes a
componente da aceleração. A expressão vetorial da força é então:
(c) O valor da velocidade é a raiz quadrada da soma dos
quadrados das componentes da velocidade. Usando as expressões obtidas
na alínea anterior,
Como a aceleração tem apenas componente , o seu valor é igual à
componente encontrada na alínea anterior:
3.5
Um pêndulo simples com 30 cm de comprimento é afastado 5 cm da
sua posição vertical, deixando que comece a oscilar
livremente. Determine: (a) O período de
oscilação. (b) A expressão do ângulo que o pêndulo faz com a
vertical, em função do tempo. (c) A expressão da velocidade
angular do pêndulo em função do tempo.
Resolução. (a) Usando a expressão
(3.38), o período é:
(b) O ângulo que o pêndulo foi afastado da vertical foi:
que é aproximadamente . A frequência angular é,
em rad/s se o tempo estiver em segundos. Como o pêndulo parte do
repouso, a expressão do ângulo com a vertical é (unidades SI):
(c) A velocidade angular é:
3.6
Uma plataforma de 4000 kg vai ser usada para determinar o peso
de camiões. A plataforma será colocada sobre três molas idênticas
de constante elástica . Admita que o peso do camião
distribui-se por igual nas três molas. (a) Determine o
valor máximo que poderá ter , para que a frequência de
oscilação da plataforma, quando não houver nenhum camião por cima,
não ultrapasse 3 oscilações por segundo. (b) Se as molas
tiverem a constante elástica calculada na alínea anterior,
determine a frequência de oscilação da plataforma, quando sobre
ela estiver um camião de 12000 kg. (c) Que distância desce
a plataforma quando o camião entra nela?
Resolução. (a) Cada mola é um oscilador harmónico com
massa igual à massa total (4000 kg) dividida por 3. Substituindo os
valores da frequência e massa na expressão da frequência do oscilador
harmónico obtemos:
(b) a frequência é:
(c) Sem o camião a distância que cada mola desce, devido ao
peso da plataforma é dada pela lei de Hooke:
Quando o camião estiver sobre a plataforma, o alongamento de cada mola
é:
A distância que a plataforma desce é a diferença desses dois
alongamentos, igual a 8.28 cm.
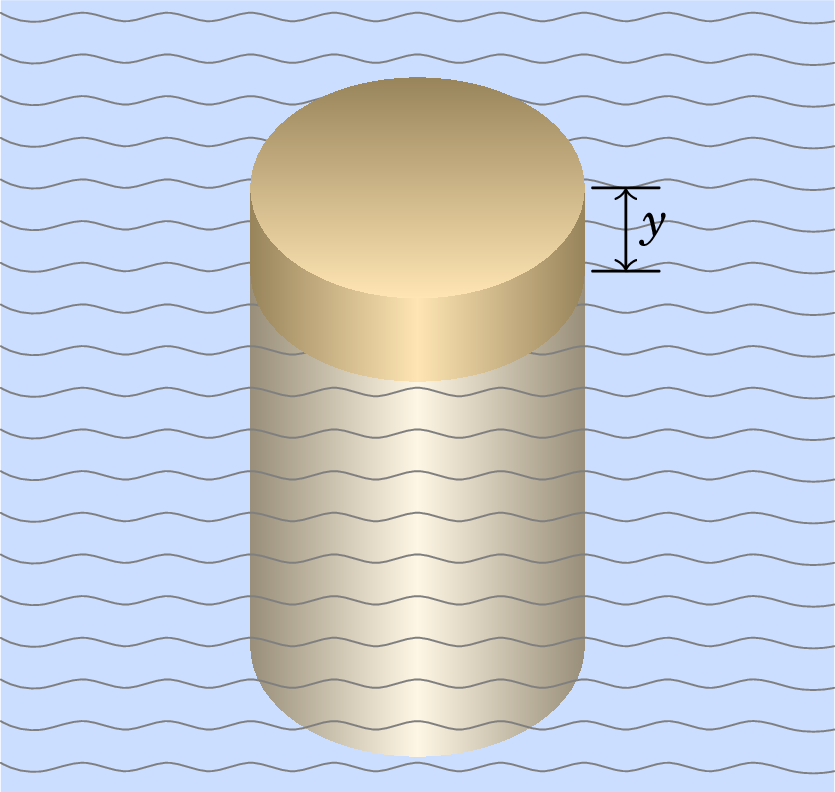
3.7
Um cilindro com base circular de área , altura e massa
flutua num líquido com densidade , ficando com uma parte
de altura fora do líquido, como mostra a figura. (a)
Determine o valor de quando o cilindro estiver em
equilíbrio. (b) Se o cilindro for empurrado ligeiramente para
baixo, diminuindo a altura fora do líquido, mostre que começará
a oscilar em torno da posição de equilíbrio e determine o período de
oscilação (ignore a resistência do líquido ao movimento e as
correntes que possam ser criadas dentro do líquido).
Resolução. (a) No cilindro atuam duas forças
verticais: o peso , para baixo, e a impulsão , para cima. Se o
eixo for vertical e para cima, a força resultante é na direção
e com valor:
Pelo princípio de Arquimedes, a impulsão é igual ao peso do volume
de fluído deslocado. E esse peso é vezes a massa de fluído
deslocado, que é o volume da parte submersa do cilindro, ,
vezes a densidade do fluído. Assim, a força resultante em função de
é:
A posição de equilíbrio do cilindro será:
A massa do cilindro é igual ao produto da sua densidade
, e do seu volume, . Como tal, a posição de
equilíbrio pode ser escrita como:
esta resposta é válida unicamente se o cilindro for menos denso do que
o fluido (). Se o cilindro fosse mais denso do
que o fluido, a impulsão não seria suficiente para equilibrar o peso,
e em vez de ficar em equilíbrio na superfície, o cilindro descia até o
fundo do fluido.
(b) Introduzindo a mudança de variável:
a força resultante em função de é:
que tem a forma da força restauradora (3.23), com frequência
angular:
que corresponde a uma oscilação com frequência angular . O
período de oscilação é:
Exercícios adicionais
3.8 Determine o comprimento que deverá ter um pêndulo simples para
que o seu período seja de 1 segundo.
3.9 Quando um homem com 80 kg sobe para uma tábua horizontal apoiada
em dois suportes, a tábua deforma-se, descendo 2.5 cm na posição
onde está o homem. Se o homem dobra ligeiramente os joelhos e volta
a esticá-los, a tábua começa a oscilar. Determine a frequência de
oscilação da tábua, admitindo que a massa da tábua é desprezável
comparada com a massa do homem.