Exercícios Resolvidos de Dinâmica e Sistemas Dinâmicos
Jaime E. Villate. Universidade do Porto, Portugal,
ISBN: 978-972-752-273-6, DOI: 10.24840/978-972-752-273-6, 2021.
7. Sistemas dinâmicos
Problema 1
Uma bola com 0.150 kg é lançada verticalmente para cima, desde
(o eixo dos
aponta para cima, na vertical). Desprezando a
resistência do ar, a energia permanece constante.
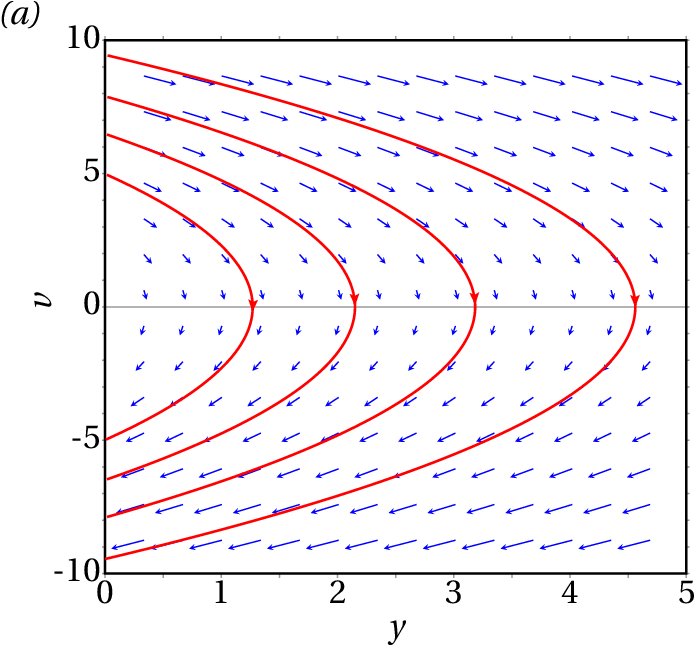
(a) Represente o retrato de fase, para
, mostrando 4
curvas de evolução diferentes (use o valor 9.8 m/s2 para
). Para cada curva, explique o significado dos pontos em que a
curva interseta os eixos.
(a) Explique como seria, no retrato de fase da alínea anterior,
a curva de evolução de uma bola largada em queda livre, que bate no
chão sendo projetada novamente para cima.
As quatro curvas de evolução na figura foram obtidas entrando no menu
de configuração, escrevendo "1 0" no campo "Trajectory
at" e clicando na tecla "Enter" e o mesmo para os
pontos "2 0", "3 0" e "4 0". Os
intervalos para
e
foram escolhidos, após algumas tentativas,
de forma a mostrar bem as quatro curvas, para valores positivos da
altura
.
O ponto onde cada curva interseta o eixo
corresponde ao instante
em que a bola atinge a sua altura máxima e a velocidade é nula. Os
dois pontos onde a curva interseta o eixo
são o instante inicial
em que a bola é lançada desde
, com velocidade positiva, e o
instante em que a bola cai regressando a
= 0, com velocidade
negativa. Por exemplo, a curva mais à direta apresentada no retrato de
fase corresponde a quando a bola é lançada desde
com velocidade
aproximadamente 8.8 m/s, atingindo a altura máxima de
4 m e caindo novamente até
onde chega com velocidade
igual a
m/s.
(b) Quando a curva de evolução chega até o ponto
com
velocidade negativa (a bola bate no chão), a curva continua num arco
elíptico no lado negativo de
, que corresponde à ação da força
elástica enquanto a bola está em contacto com o chão, sendo deformada
e recuperando logo a sua forma esférica inicial (oscilador harmónico
simples, admitindo que não há perdas de energia durante a
deformação). O arco elíptico descreve metade de uma elipse, terminando
no ponto inicial da curva de evolução, com
e velocidade
positiva e a curva repete-se indefinidamente. Quanto mais rígida for a
bola, menor será o semieixo do arco elíptico no lado negativo do eixo
.
Problema 2
Em todos os problemas do capítulo 1, diga quais
correspondem a sistemas autónomos ou não autónomos e conservativos
ou não conservativos. Represente o retrato de fase do sistema do
problema 6, mostrando a curva de evolução com as
condições iniciais dadas.
Para determinar se um sistema com um grau de liberdade é ou não
autónomo, há que conhecer a expressão da aceleração tangencial. No
problema 1 essa expressão é desconhecida, mas nos restantes problemas
a expressão de
é dada ou pode ser calculada. As
respostas mostram que no problema 5,
e no
problema 11,
. No problema 7, o gráfico mostra
que
, onde
e
são constantes; derivando os dois
lados dessa equação obtém-se a expressão da aceleração tangencial:
Como tal, há quatro problemas (2, 4, 5 e 11), em que a expressão da
aceleração é uma função que depende do tempo. Isso implica que os
sistemas nesses 4 problemas não são autónomos e, como tal, também não
são conservativos.
Nos restantes 6 problemas (3, 6, 7, 8, 9 e 10), o respetivo sistema é
autónomo, porque a expressão da aceleração (equação de movimento) não
depende do tempo. Nesses 6 casos a equação de movimento,
, escreve-se como o sistema de duas equações de
evolução:
E a divergência da velocidade de fase será:
Unicamente no problema 10 a expressão da aceleração tangencial,
, depende de
, ou seja, a divergência é diferente de zero
e, como tal, o sistema não é conservativo.
Nos problemas 3, 6, 7, 8 e 9, o sistema é conservativo, porque a
expressão
não depende realmente de
, ou seja, a
divergência é nula.
O retrato de fase do problema 6 obtém-se com o seguinte comando
A curva de evolução correspondente às condições iniciais dadas
(
m e
) foi obtida entrando no menu de
configuração, mudando o campo "direction" para
"forward", a cor no campo "fieldlines" para
"black", escrevendo "0.8 0" no campo
"Trajectory at" e clicando na tecla "Enter".
Problema 4
Uma partícula com massa de 1 kg desloca-se ao longo do eixo dos
. Em unidades SI, a força tangencial sobre a partícula é dada
pela expressão
.
(a) Determine os pontos de equilíbrio do sistema.
(b) Encontre as expressões para a energia potencial e a energia
mecânica, em função da posição
e da velocidade
.
(c) Escreva as equações de evolução e diga que tipo de sistema
dinâmico representam.
(d) Caracterize cada um dos pontos de equilíbrio.
(e) Determine se o sistema tem ciclos, órbitas homoclínicas ou
órbitas heteroclínicas e, nos casos afirmativos represente uma dessas
curvas no retrato de fase.
(a) Os pontos de equilíbrio são os pontos onde a
velocidade e a aceleração
são nulas, ou seja, onde
a força é nula. Fatorizando a expressão da força (pode
também usar-se o comando solve do
Maxima):
Conclui-se que há 3 pontos de equilíbrio, em
,
e
,
com
. No espaço de fase (
,
), as coordenadas dos pontos de
equilíbrio são (
, 0), (0, 0) e (2, 0).
(b) A energia potencial é igual a uma primitiva qualquer da
expressão da força, multiplicada por
E a expressão da energia mecânica é:
(c) As duas equações de evolução são (unidades SI):
Trata-se de um sistema dinâmico autónomo, porque o tempo não aparece
explicitamente no lado direito das equações, e conservativo, porque a
divergência da velocidade de fase é:
A função hamiltoniana é, neste caso, a própria energia mecânica.
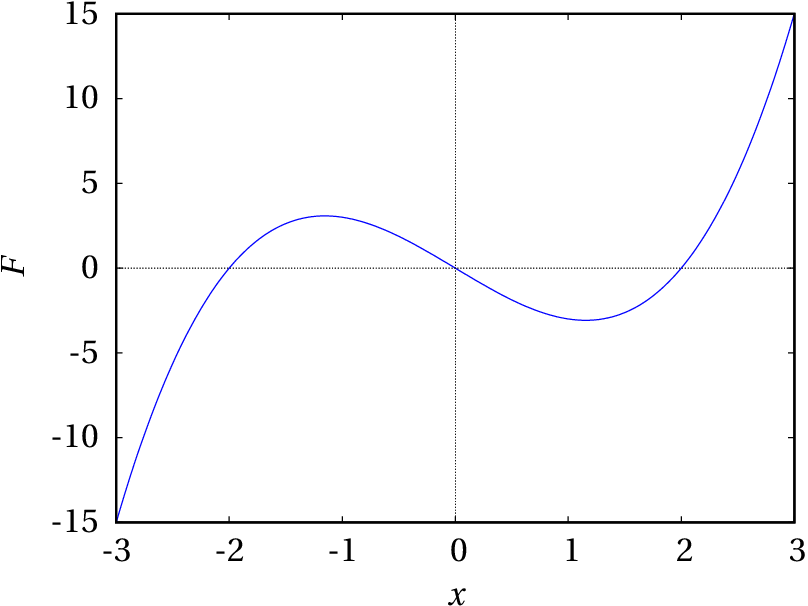
(d) O gráfico da força é:
(%i3)plot2d (x^3-4*x, [x,-3,3], [ylabel,"F"]);
E mostra os três pontos de equilíbrio (raízes da função
). Nos
pontos
e
, a força é negativa ao lado esquerdo do ponto e
positiva ao lado direito; isso quer dizer que na vizinhança do ponto
de equilíbrio, a força aponta no sentido oposto do ponto e, como tal,
os pontos de equilíbrio (
, 0) e (2, 0) no espaço de fase são
instáveis.
No ponto
, a força é positiva no lado esquerdo, ou seja, aponta
no sentido de
, e negativa no lado direito: também aponta no
sentido de
. Como tal, o ponto (0, 0) no espaço de fase é ponto
de equilíbrio estável.
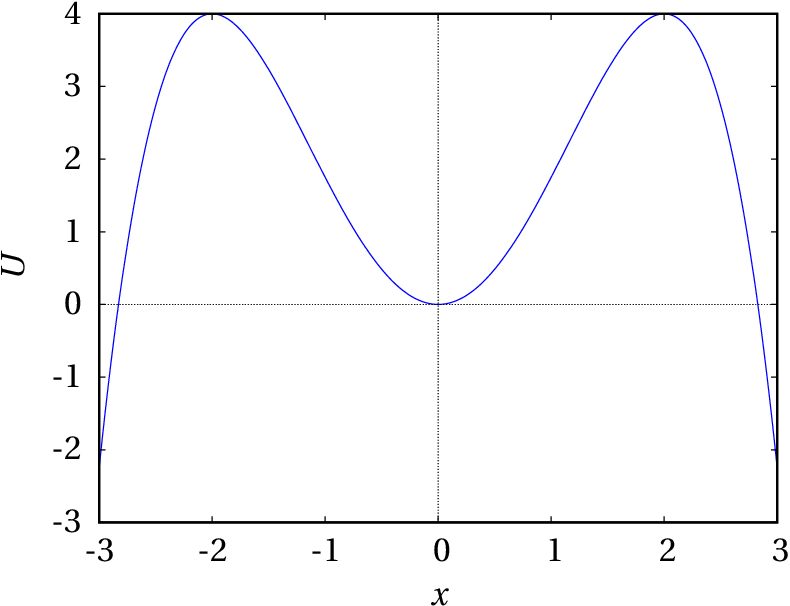
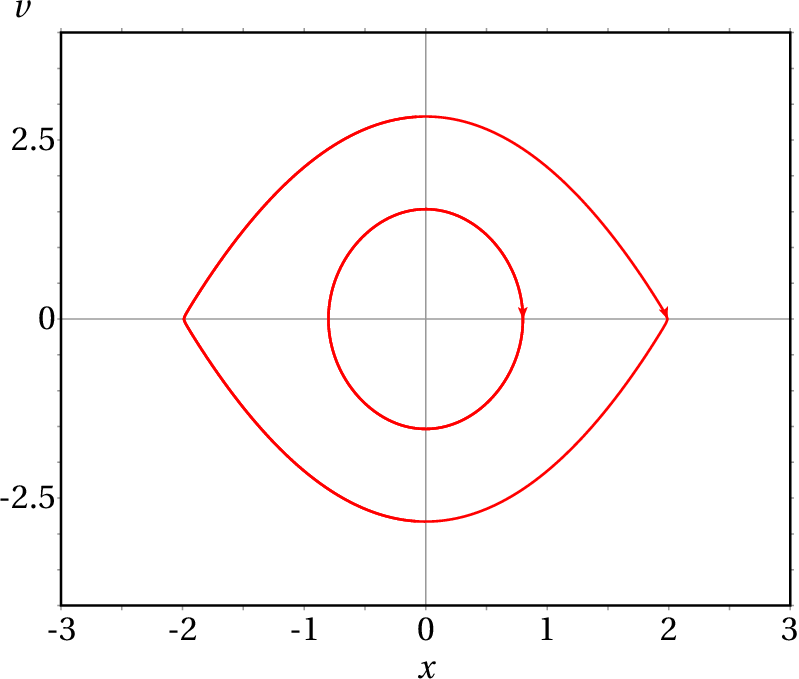
(e) Os ciclos e órbitas encontram-se mais facilmente analisando
o gráfico da energia potencial:
Se a energia mecânica for maior que 0 e menor que 4, o sistema pode
estar a oscilar à volta do ponto de equilíbrio em
. Como tal,
existem infinitos ciclos. Se a energia mecânica for exatamente igual a
4, há seis possíveis movimentos:
O sistema, inicialmente em
, com velocidade positiva,
aproxima-se assimptoticamente de
.
O sistema, inicialmente em
, com velocidade negativa,
afasta-se até
. (em
aproxima-se de
).
O sistema, inicialmente em
, com velocidade negativa,
aproxima-se assimptoticamente de
.
O sistema, inicialmente em
, com velocidade positiva,
afasta-se até
(em
aproxima-se de
).
O sistema, inicialmente em
, com velocidade positiva,
aproxima-se assimptoticamente de
(em
aproxima-se de
).
O sistema, inicialmente em
, com velocidade negativa, aproxima-se
assimptoticamente de
(em
aproxima-se de
).
As curvas de evolução correspondentes aos últimos dois movimentos na
lista anterior formam uma órbita heteroclínica. Não existem órbitas
homoclínicas; para que existissem seria necessário que houvesse um
nível de energia mecânica que passasse por apenas um ponto de
equilíbrio instável e por um ponto de retorno, mas isso não acontece
no gráfico de
.
O retrato de fase obtém-se com o seguinte comando (a opção
vectors é usada neste caso para que não seja
mostrado o campo de direções):
Se no instante inicial a partícula estiver na região
com
velocidade zero, ficará oscilando em torno do ponto
. Como tal,
para mostrar um ciclo no gráfico produzido por plotdf basta clicar
num ponto com coordenada
e
no intervalo ]-2, 2[. Ou,
com maior precisão, entra-se no menu de configuração e escrevem-se as
coordenadas
e
do estado inicial, separadas por espaço; por
exemplo: 0.8 0. A seguir clica-se na tecla "Enter" e
aparecerá o respetivo ciclo no gráfico. A trajetória heteroclínica
pode ser traçada usando como estado inicial um ponto próximo dum dos
pontos de equilíbrio instável (-2, 0) ou (2, 0). No entanto, a
instabilidade do ponto faz com que o método numérico usado por plotdf
para traçar a trajetória seja instável. É necessário experimentar com
diferentes valores do estado inicial; o resultado na figura seguinte
foi obtido usando como estado inicial (1.99, 0).
Problema 6
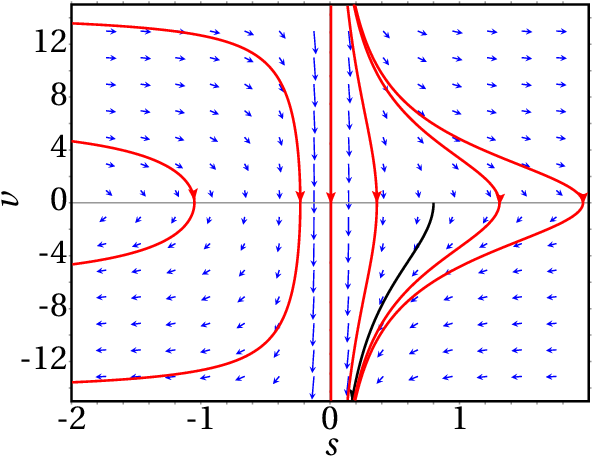
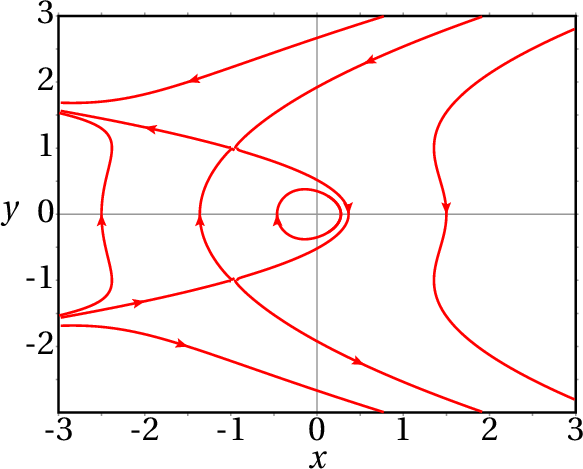
A figura mostra o retrato de fase do sistema dinâmico com equações de
evolução:
(a) Indique se o sistema tem algum ciclo, órbita homoclínica ou
órbita heteroclínica.
(b) Explique porque a seguinte afirmação é errada: "O
retrato de fase inclui duas curvas de evolução parabólicas que se
cruzam em dois pontos".
(a) A primeira componente da velocidade de fase,
, é
nula quando
for igual a 0, 1 ou −1. Existem então unicamente
3 pontos de equilíbrio, (0, 0), (−1, 1) e (−1, −1),
que aparecem todos na figura e, como tal, as curvas de evolução
importantes já estão todas na figura. A figura mostra que não existe
nenhuma órbita homoclínica, existem infinitos ciclos em torno da
origem e uma órbita heteroclínica entre os pontos (−1, 1) e
(−1, −1).
(b) As duas parábolas são realmente 2 pontos de equilíbrio e 6
curvas de evolução diferentes, que se aproximam assimptoticamente ou
se afastam desses dois pontos, sem tocá-los. As curvas de evolução
nunca podem cruzar-se.
Problema 9
A equação de movimento de um pêndulo simples
é (problema 6 do capítulo 6)
As variáveis de estado são o ângulo com a vertical,
e a
derivada desse ângulo,
.
(a) Escreva as equações de evolução do sistema.
(b) Determine a função hamiltoniana
a partir
das equações de Hamilton:
(c) Analisando o gráfico da energia potencial (função
hamiltoniana com
= 0), demostre que o sistema tem uma
órbita heteroclínica e ciclos mas nenhuma órbita homoclínica.
(a) Introduzindo a velocidade angular
, a equação de
movimento transforma-se num sistema de duas equações de primeira ordem
b) Substituindo as equações de evolução nas equações de
Hamilton obtém-se
A primeira equação implica que
é igual a
, mais uma
função
que depende de
. Derivando essa expressão em ordem
a
e substituindo na segunda equação acima, obtém-se
e a função hamiltoniana é
observe-se que é igual à energia mecânica
, dividida
pelo momento de inércia
.
(c) A energia potencial é igual a uma constante negativa vezes
. Assim sendo, o seu gráfico tem a mesma forma do gráfico
de
, mas oscila entre
e
, em vez de −1
e 1. O gráfico tem mínimos (pontos de equilíbrio estável) em 0,
,
,... e pontos máximos (pontos de
equilíbrio instável) em
,
,... Qualquer
valor de
entre
e
produz um segmento horizontal que
corta o gráfico de
em dois pontos e, assim sendo, corresponde a um
ciclo. A recta horizontal
passa por todos os pontos máximos de
e, portanto, corresponde a uma órbita heteroclínica entre
e
, outra órbita heteroclínica entre
e
, etc. Não existem órbitas homoclínicas
porque qualquer segmento na reta
começa e termina em dois
pontos máximos diferentes e não interseta a curva
em nenhum outro
ponto.