Isaac Newton
had a very ingenious idea when he was 23, which would later
develop into his famous theory of gravitation and the laws
of motion. Newton thought that in the same way as an apple
falls to the Earth, due to its gravitational attraction, so
the Moon is also falling to the Earth under the same
gravitational attraction of the Earth. The reason why the
Moon never reaches the surface of the Earth, as the apple
does, is because it also has a very high velocity component
in the direction parallel to the surface of the Earth;
therefore, the distance the Moon falls during a time
interval, combined with the distance it moves parallel to
the surface give an arc with constant radius. Using the data
he knew for the distance from the Earth to the Moon and
the orbital period of the Moon, Newton determined the
distance that the Moon falls per unit time; comparing that
distance with the distance that an apple falls per unit
time, he concluded that the gravitational attraction of the
Earth decreases in the proportion of the square of the
distance from the Earth's center.
4.1. Newton's laws
Newton's three laws of motion are the basis of
classical mechanics, which describes the motion of objects
around us as well as the motion of planets, stars and
other distant objects. The three laws were clearly stated in
a single page of the book Mathematical Principles
of Natural Philosophy, written by Newton in 1687.
4.1.1. Law of inertia
The original statement given by Newton of his first law,
often referred to as the law of inertia, is as follows:
LAW I.
"Every body continues in its state of rest, or of uniform motion in a
right line, unless it is compelled to change that state
by forces impressed upon it.
Projectiles continue in their motions, so far as they are not
retarded by the resistance of the air, or impelled
downwards by the force of gravity. A top, whose parts by
their cohesion are continually drawn aside from
rectilinear motion motions, does not cease its rotation,
otherwise than as it is retarded by the air. The greater
bodies of the planets and comets, meeting with less
resistance in freer spaces, preserve their motions both
progressive and circular for a much longer time."
There are reference frames called Newtonian
or inertial reference frames
where the law of inertia is valid. Let us look at an
example: a sphere resting on top of a horizontal table
inside a train wagon that passes through a train station
with uniform rectilinear motion.
A person sitting on the station sees the sphere moving
together with train, therefore with uniform rectilinear
motion. Meanwhile, a passenger seating on the train wagon
will see the sphere at rest on the table. The station and
the train wagon are both inertial reference frames, so the
two persons see the sphere behave according to the law of
inertia; one of them sees the sphere remaining and the
other person sees that it maintains its uniform
rectilinear motion because there are no forces that compel
it to change that state of rest or uniform motion.
If the train slows down, the passenger in the station
sees that the sphere maintains its uniform speed, but
since the trains speed is getting lower, the table is
being left behind and the sphere rolls to its front. The
station continues to be an inertial reference
frame. However, the wagon slowing down is no longer an
inertial reference frame so, from the point of view of the
person on the wagon, the sphere no longer behaves
according to the law of inertia: it leaves its state of
rest and starts speeding up without existing a force
responsible for that change.
The rotation of the Earth implies that it is not an
inertial frame. However, the weight of the objects on the
surface of the Earth and the normal force opposed to it
eliminate the effects of the rotation and, therefore, with
respect to horizontal motion on the surface of the Earth,
it is a good approximation to assume that the Earth is an
inertial frame. Any object at rest or with uniform
rectilinear motion relative to it is also be an inertial
frame. The station or a stopped train are at rest relative
to Earth, so they are inertial frames. A train with
uniform rectilinear motion relative to the Earth is also
an inertial frame, but a train slowing down or speeding up
or with curved motion relative to Earth is not an inertial
frame.
4.1.2. Force and acceleration
The second law can be viewed as the definition of the
vector associated to a force, measured in terms to the effect
it produces in the motion of the object upon which it
acts. Newton stated that law in his book in the following
way:
LAW II.
"The change of motion is proportional to the motive
force impressed; and is made in the direction of the
right line in which that force is impressed.
If any force generates a motion, a double force will
generate double the motion, a triple force triple the
motion, whether that force be impressed altogether and
at once, or gradually and successively. And this motion
(being always directed the same way with the generating
force), if the body moved before, is added to or
subtracted from the former motion, according as they
directly conspire with or are directly contrary to each
other; or obliquely joined, when they are oblique, so as
to produce a new motion compounded from the
determination of both."
One of the eight definitions preceding the statement of
the three laws in Newton's book was the definition
of quantity of motion, as the product of
mass and the velocity of a body. The quantity of motion is
frequently referred to as linear momentum. The
explanation following the statement of the second law,
about how to sum the linear momentum due to a force to the
linear momentum the object already had, correspond to our
contemporary definition of vector addition. Therefore, in
today's notation the linear momentum (Newton's quantity of
motion) is a vector
, equal to the product of
the mass of the
object times its velocity,
(4.1)
And the change of motion mentioned in the second law
would be the final linear momentum,
, minus the
initial linear momentum
and as stated in the
second law, that change of linear momentum is a vector
with the same direction as the force that produces it. The
sentence "whether that force be impressed altogether
and at once, or gradually and successively" means
that the change in linear momentum equals the time
integral of the force during the time interval when it
acts. Hence, the mathematical statement of Newton's second
law is:
(4.2)
where
is the force as a function of time. In the
statement of that law, Newton restricts to a single force,
but later in his book he explains that several forces should
be added as vectors and he explains the
parallelogram rule to add
forces (see
figure 2.3
in chapter 2).
Therefore, the force
in
equation 4.2 must be interpreted as
the total force
acting on the object, namely, equal to the sum of all
forces acting upon it.
The time integral of the total force, on the left-hand
side of equation 4.2, gives a vetor
called impulse. Hence, if a total
force acts during a time interval [
,
] upon a
body with initial linear momentum
, its linear
momentum at time
will be
.
Equation 4.2 can be written in
differential form, namely,
(4.3)
And when the mass of the body is constant, replacing
by
leads the following equation
(4.4)
where
is the acceleration of the body, equal to
the time derivative of the velocity. This is the most
frequently used form for Newton's second law.
The unit of force adopted in the International System of
units is the newton, N. A force of 1 N is a
force that makes a 1 kg body accelerate at
1 m/s2.
As already mentioned in previous chapters, all objects in
free fall in the vacuum would be accelerated with the
same acceleration of
gravity , which near the surface of the Earth
has a value
.
Thus, according to Newton's second law, the
weight of any
object (gravitational force exerted by the Earth) is
directly proportional to its mass:
(4.5)
where is a constant vector in the
vertical direction, pointing downwards and with magnitude equal to
, which is approximately 9.8 m/s2.
For example, a body with a mass of 2 kg weights 19.6 N
the surface of the Earth. If the same body were
on a spacecraft half way between the Earth and the
Moon, its mass would be the same but its weight would be
smaller. The acceleration of gravity at that
distance from the Earth would be only 0.011
m/s2, so the object would weight only 0.022 N.
The weight of a body is actually the sum of many forces:
the weights of each of all the particles that make up the
body, which together produce the total weight
. In
addition to the magnitude and direction and direction of a
force, the point where it is applied is also
important. Newton addresses this issue in his book, but
this subject will be postponed in this book
until chapter 5. For now,
it will suffice to take into account that the weight of a
body must always be represented at a point
called center of gravity, that in
homogeneous bodies with simple geometric shapes is located
at its geometric center.
Like the first law, the second law is valid only in
inertial reference frames. Two inertial references may
have a relative velocity, but this relative velocity must
be constant. We conclude that the relative acceleration of
one inertial frame relative to the others should be
zero. As such, the acceleration of an object should be the
same in relation to any inertial frame. The velocities
measured in different inertial frames may be different,
but their derivative (acceleration) will be the same in
all. To determine whether a frame is inertial, it is
enough to observe free objects, in which no force acts. If
the uniform rectilinear motion remains in a state of rest,
the frame will be inertial. Newton believed in the
possibility of measuring the absolute acceleration of an
object, relative to absolute space, and in the equation
interpreted
as the absolute
acceleration of the object.
4.1.3. Law of action and reaction
LAW III.
"To every action there is always opposed an
equal reaction: or, the mutual actions
of two bodies upon each other are always equal, and
directed to contrary parts.
Whatever draws or presses another is as much drawn or
pressed by that other. If you press a stone with your
finger, the finger is also pressed by the stone. If a
horse draws a stone tide to a rope, the horse (if I may
so say) will be equally drawn towards the stone; for the
distended rope, by the same endeavor to relax or unbend
itself, will draw the horse as much towards the stone as
it does the stone towards the horse, and will obstruct
the progress of the one as much as it advances that of
the other. If a body impinge upon another, and by its
force change the motion of the other, that body also
(because of the equality of the mutual pressure) will
undergo an equal change, in its own motion, towards the
contrary part. The changes made by these actions are
equal, not in the velocities but in the motions of
bodies; that is to say, if the bodies are not hindered
by any other impediments. For, because the motions are
equally changed, the changes of the velocities made
towards contrary parts are inversely proportional to the
bodies."
This third is known as law of action and
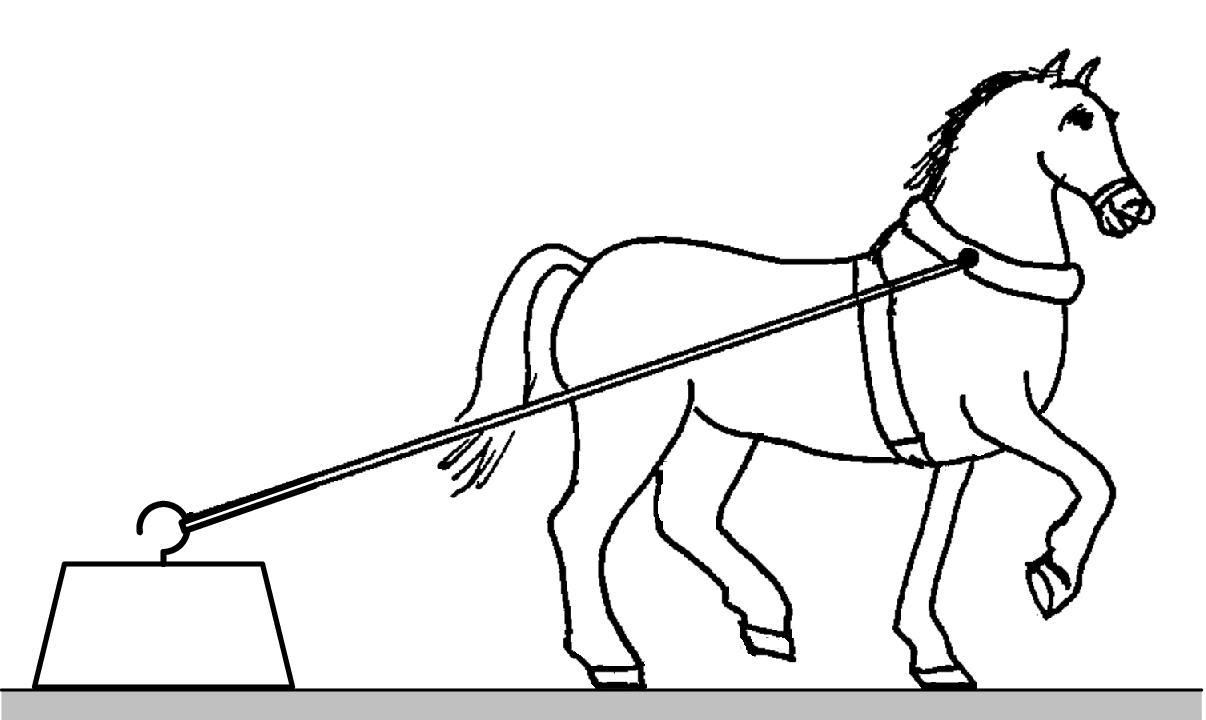
reaction. Let us consider the example given by Newton:
a horse dragging a stone tied to a rope
(figure 4.1 ). The rope exerts the
same force on the stone and on the horse, but in opposite
directions.
Figure 4.1: Horse dragging a 350 kg stone.
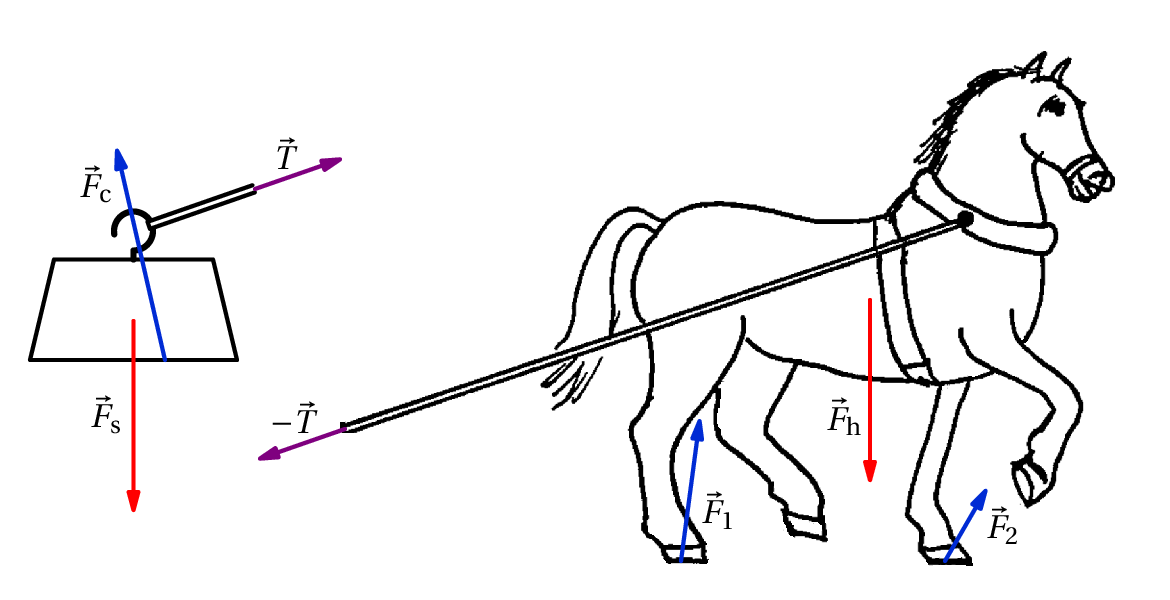
It is convenient to analyze separately the forces acting
on the stone and the horse, as shown in
figure 4.2. If the horse moves with
constnat speed, Newton's second law implies that the sum
of the forces acting on the stone and on the horse are
both zero.
Figure 4.2: Forces acting upon the stone and the horse.
The weight of the stone,
, Acts in
its center of gravity. The rope pulls the block in the
direction in which it is stretched, with a force
, As shown on the left side of
figure 4.2. The sum of that force
of the rope upon the stone plus the weight of the stone is
a vector that points down and to the right. Since the sum
of all the forces upon the block is zero, the
force
impressed by the ground on the
stone points upwards and to the left; that force is the
result of the contact between the surfaces of the stone
and the floor.
The rope pulls the horse back, with the force
opposite to the force acting on the stone. On the two
horseshoes of the horse that are in contact with the
ground there will be contact forces,
and
, which point upwards and to the right. The sum
of those two forces plus the weight of the horse and the
force impressed by the rope should be equal to zero.
The forces exerted by the ground are the 3 forces
,
and
. These
three forces of contact with the ground counteract the
tendency to fall from the block and the horse, and prevent the
stone and the horse from accelerating forward and
backward. The rope is opposing the motion of the horse and
keeping the stone in motion.
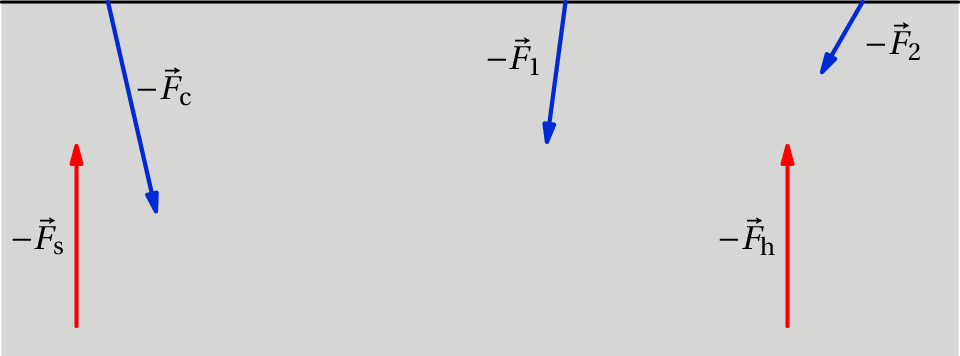
A total of 5 reaction forces act upon the ground, as
shown in figure 4.3. The
reactions to the stone and horse weights,
and
, are the gravitational forces that
the stone and the horse produce on the Earth. These forces
act in the center of gravity of the Earth, but were
represented near the ground in the figure. The other three
forces are the contact forces exerted on the ground by the surface
of the stone and the horseshoes. Since the speed of the horse
is constant, the sum of those 5 forces is zero.
Figure 4.3: Forces exerted on the
ground.
If the horse were to accelerate, the sum of the forces on
the horse and the stone would be a force pointing to the
right. The sum of the 5 forces acting on the ground would
be the reaction to that force, ie, an equal and opposite
force would act on the Earth, that would make it
accelerate to the left.
However, since the mass of the Earth is many orders of
magnitude greater than the mass of the horse and the
block, the Earth's acceleration to the left would be
imperceptible compared to the acceleration to the horse's
right and the block. As Newton points out, the changes
produced by the forces of the horse-block system on Earth
and the reactions of these forces on the horse-block
system do not result in equal velocities and opposite
directions, but rather equal amounts of movement .
Example 4.1
The only two forces acting upon a particle with mass of
200 grams are:
in SI units, where
is the time. The particle is
initially at rest at
= 0, in the position
. Determine the
position of the particle at
= 3 s.
Solution. The total force is the sum of the two forces
Dividing by the mass, 0.2 kg, we get the acceleration vector
Which can be replaced in the equation
to obtain a
separable differential equation:
Separating variables and integrating,
Replacing this expression in the equation
, we obtain a
separable differential equation:
Using once again the method of separation of variables,
we obtain the position vector at
= 3
4.2. Normal and tangential force components
As discussed in Chapter
3, the acceleration of an object can have tangential and
normal components,
(4.6)
where
and
. The
total force on an object can also be written as the sum of
its tangential and normal components:
(4.7)
And Newton's second law, leads to the expressions:
and
.
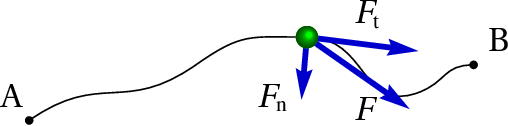
If the total force upon a particle with velocity
is
, The component
in the
direction parallel to
increases or decreases the
speed, depending on whether that component has the same
direction of
or the opposite direction. The normal
component
, perpendicular to
, makes
the trajectory curve in the direction of that component
(figure 4.4).
Figure 4.4: Tangential and normal force components.
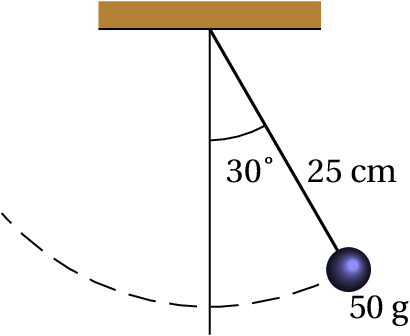
Example 4.2
A simple
pendulum, formed by a sphere of 50 grams
hanging from a 25 cm string, oscillates by the action of
gravity. At the instant shown in the figure, in which the
string makes an angle of 30 ° with the vertical, the
sphere is moving higher with speed ofand the value of 1
m/s. Find the magnitude of the tension on the string and
the tangential acceleration of the sphere at that
instant.
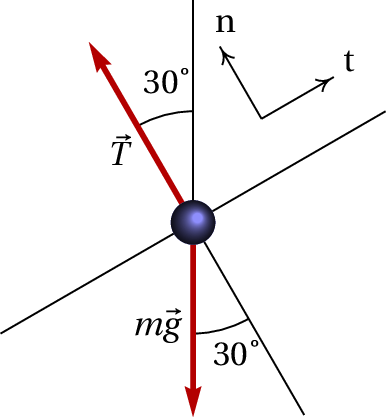
Solution. It is convenient to make a free-body
diagram for the sphere, that is, a diagram indicating only
the external forces acting on the object. In this case,
ignoring the air resistance, there are only two possible
causes for these forces: the string and the gravitational
attraction. Thus, the only external forces on the sphere are the
tension
of the string, which acts in the direction
of the string and the weight,
, in the vertical
direction and downwards. The diagram shows those two forces
and two angles which are equal.
Once the external forces are identified, a system of axes
is chosen to calculate the components of those forces. In
this case, since there is circular motion, it is convenient
to use the tangential and normal axes, represented by the
letters
and
in the diagram.
The normal axis points in the direction of the center of
curvature of the trajectory, which in this case is the same
direction of the string. The tangential axis is tangent to
the circular trajectory; therefore, the velocity vector is
perpendicular to the string. As the sphere moving higher,
the velocity vector has the direction of the
axis..
The tension on the string has only normal component. The
tangential component of the weight is
N and the normal component is
N. Thus, the
tangential and normal components of the total force are:
The tangential acceleration is hitherto unknown, but the
normal acceleration can be obtained from the information
given in the problem.
(SI units). Equating the tangential and normal components
to
and
, The following
system of equations is obtained:
The solution of that system is
= -4.9
m/s2 and
= 0.624 N. The negative sign of the
tangential acceleration means that the speed of the sphere is
decreasing.
4.3. Normal and frictional forces
When two surfaces are in contact there is a force among
them, such as the forces
,
and
in the example of the horse dragging a stone
given in the previous section
(figure 4.2). Those forces may
point in different directions, but always in the sense from
the surface towards the object on which that forces is
acting.
It is convenient to separate the contact forces into two
components: one component perpendicular to the surfaces in
contact, called normal
force and another component tangent to the
surfaces, called frictional
force.
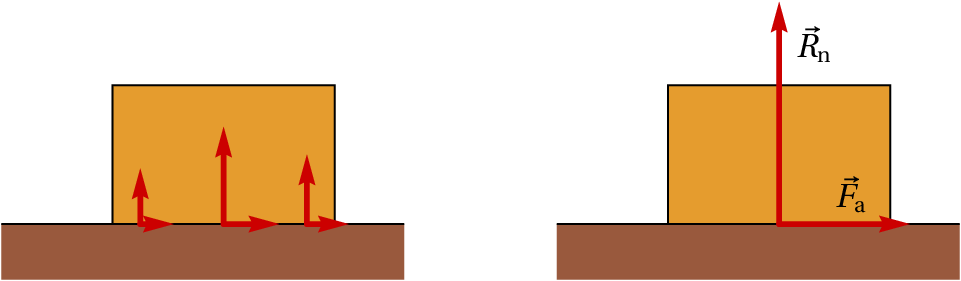
The force of contact between two surfaces is actually
distributed at various points on the surface. The resultant
of all these forces can be represented as a single force at
a point on the surface, separating the normal and tangential
components (figure 4.5 ). The normal
force,
, points always in the sense that would make the
two bodies in contact separate. The frictional force,
, Can be in any sense of any of the
directions tangent to the surface.
Figure 4.5: normal force
and frictional
force
on a block on the surface of a
table.
4.3.1. Static friction
When there is no relative movement between the two surfaces
in contact, the frictional force is called
static
frictional force. It may be zero, or it may point in any
direction tangent to the surfaces in contact.
In the example of the horse and the stone
(figure 4.2), the tangential
components of the contat forces on the horse's horseshoes,
and
, are static frictional
forces. It is thanks toe the static frictional force with
the road that wheeled vehicles can move and stop. It is
also thanks to that force that we can walk: we push the
ground with our feet and the reaction of the ground in the
opposite direction makes us move forward.
Figure 4.6: The force that allows the street car
to climb a slope or go downhill with constant speed is
the static frictional force between the wheels and the
rails.
If the floor was covered with ice, our feet would slip
making it harder for us to move or stop. This is because the
magnitude of the static frictional force can not exceed a
maximum value, which is proportional to the normal
force:
(4.8)
where
is a constant characteristic of the
type of surfaces in contact, called
coefficient of static friction.
It usually has a value less than 1. In terms of the full
contact force, this implies that the contact force is usually
close to the normal direction, with a deviation of less
than 45°.
Let us consider an example: the forces between the road
and the tires of a bicycle. The frictional forces between
the two tires and the road are both static frictional
forces because the wheels do not slide. In the rear wheel
the frictional force points forward in the direction the
bicycle is moving
(figure 4.7), and they are the
reaction of the road to the action that the tire exerts on
it in the opposite direction.
The static frictional force on the front wheel is in the
direction opposite to the motion of the bicycle, because
no traction is exerted by the rider on that wheel. The
friction in the wheel axis and the rolling friction on the
tire act against the rotation of that wheel, and the
frictional force of the road allows the wheel to maintain
its rotation in spite of those other forces.
Figure 4.7: Forces exerted by the road on the tires
of a moving bicycle.
If the speed of the bicycle is constant, the magnitude of
the frictional force on the rear tire should be equal to
the sum of the magnitudes of the frictional force on the
front tire, the air resistance and the rolling friction
upon the wheels.
4.3.2. Kinetic friction
When the two surfaces in contact slide between them, the
frictional force is called kinetic frictional force. In the
example of the horse and the stone
(figure 4.2) the tangential
component of the contact force
acting
on the stone is a kinetic frictional force.
The kinetic frictional force
is always in the same direction of the velocity of the
object relative to the surface, but in the opposite
sense. Its magnitude is directly proportional to the
normal force:
(4.9)
where
is the
coefficient of kinetic
friction, which is usually less than the
coefficient of static friction between the same
surfaces.
Being in the opposite sense of the relative motion, the
kinetic frictional force makes the relative velocity of
the two surfaces decrease, but it can never reverse the
direction of that relative velocity. At the instant that
relative velocity becomes zero, the kinetic frictional
force vanishes and it might be replaced by the static
frictional force.
Thus, although the magnitude of the kinetic frictional
force is constant, it depends implicitly on the velocity
because it is always in the direction of the velocity and in
the opposite sense. The vector expression of the kinetic
frictional force is as follows:
(4.10)
Where
is the velocity of the body on which the
force acts, relative to the surface that produces it.
Example 4.3
Compute the forces acting on the stone and the horse in
figure 4.1, when they move with
constant speed, the mass of the horse is 300 kg, the mass
of the stone is 350 kg and the angle the rope does with
the horizontal is 20°. The coefficient of kinetic friction
between the stone and the ground is 0.4 and the
coefficient of static friction between the horseshoes and
the ground is 0.5.
Solution. The forces acting on the block and on
the horse were shown in
figure 4.2. Since the acceleration
is zero, the sum of the horizontal and vertical components
of the forces on the stone and the horse must be zero.
Starting with the stone, we can separate the force
into the normal force
,
perpendicular to the ground, and the frictional force
, tangent to the ground. The sum of the
horizontal and vertical forces is,
Notice that the frictional force on the stone is due to
kinetic friction, because the stone is sliding on the
floor. Therefore,
and
replacing the values of the coefficient of kinetic
friction, mass of the stone and acceleration of gravity,
we obtain a system of two equations with two unknowns
This system can be solved in Maxima with the following command:
The normal force in the block is 2994 N and the tension
in the rope is 1274 N.
Looking now at the free-body diagram for the horse
(figure 4.2), the sums of the
horizontal and vertical forces acting on the horse are:
It should be noted that in this case the relationship
between the frictional forces and the normal forces is
undetermined, because the friction is static. Replacing
the value of the tension
already obtained, the mass of
the horse and the acceleration of gravity, we get the
following system:
The sum of the normal forces on the horse's feet is 3376
N, and the sum of the frictional forces is 1198 N. In the
chapter on dynamics of rigid
bodies it will be explained how to determine the
values of
and
separately. For the time being,
it follows only that the sum of these two forces is equal
to 3376 N.
The values of
and
can
not be determined without additional information; it would
be necessary to know the relation between the pressures
that the horse is exerting on each foot, resulting from
the action of different muscles on different joints. Since
we are regarding the horse as a single rigid body, it is
only possible for us to find the sum of those two
forces.
The coefficient of static friction between the horseshoes
and the road allows us to determine whether it is feasible
for the horse to drag that stone, which is heavier than
its own weight. The maximum static frictional force
between the horseshoes and the floor is:
Since the sum of the two frictional forces
and
is less than this value, it is then
possible for the horse to drag the stone. The horse could
even drag a stone a bit heavier, but if the mass of the
stone was bigger than a maximum value, the horseshoes
would start to slip and the horse would not be able to
drag the stone.
4.3.3. Fluid resistance
Most of the motions analyzed in this book are rigid body
motions within fluids. In the example of the horse dragging
a stone, the two bodies are moving into the air, which is a
fluid. The air exerts a force
of resistance, which is always opposite to
the direction of motion.
In the two free-body diagrams in
figure 4.2 the air resistance was
ignored; it was assumed to be much smaller than the other
forces, because the speed was low. Whe the speed is high,
as it may happen for an object in free fall, the air
resistance force is not negligible. In this section we
discuss the dependence of that force on velocity.
The force that opposes the motion in fluids is produced
mainly by two different mechanisms; the first one is
related to the viscosity of the fluid and is due to
the fact that the neighboring fluid layers are adhered to
the body, moving with it and creating friction with other
layers of fluid more distant, giving rise to a force
directly proportional to the velocity.
The second mechanism has to do with the pressure
difference generated in the fluid ahead and behind the
moving object. The fluid is compressed in the front region
and decompressed in the back. This difference of pressure
produces a force opposite to the velocity and directly
proportional to the square of its magnitude.
The two mechanisms are always present but in some
conditions one of them may be much more appreciable than the
other. The Reynolds number can be used as a
measure of which of the two mechanisms is stronger; it is
defined as
(4.11)
where
Is a length of the order of magnitude of the
straight section of the body seen in the direction of
motion,
is the speed of the body,
is
the density of the
fluid and is the viscosity coefficient
of the fluid. The Reynolds number has no units and it
is not necessary to know its exact value but only its
order of magnitude.
Stokes
showed that when the Reynolds number is very low (order of
magnitude of 1 or less), the fluid resistance force is
proportional to the velocity. In the case of a sphere of
radius
, the expression for this force is:
(4.12)
When the Reynolds number is very high (order of magnitude
of the thousands or more) the fluid resistance force is
proportional to the square of the speed of the body:
(4.13)
where
is the density of the fluid,
is the drag
coefficient of the body, smaller for sharp bodies
and larger for less aerodynamic ones, and
is the
frontal area of the body, namely, the area of its
projection in the direction of motion. In the case of a
sphere of radius
, its straight section is
and the drag coefficient is approximately 1/2; therefore,
the fluid resistance force on the sphere when the Reynolds
number is high is:
(4.14)
If the velocity is very high, of the order of the speed
of sound in the fluid (in air it is about 340 m/s) the fluid
resistance force is proportional to the speed raised to an
exponent greater than 2.
For a sphere of radius
, the Reynolds number can be
estimated by replacing
by
in
equation 4.11. To decide which
of the two equations, 4.12
or 4.14, is more accurate, one may
start by admitting that the Reynolds number is low and
solve the problem using
equation 4.12. If the values
obtained lead to a low Reynolds number, it is then assumed
that the solution is correct. Otherwise, one should solve
the problem again using
equation 4.14 and check that
the result leads to a high Reynolds number but the
velocity is less than the velocity of sound in that fluid
(see problem 8 at the end of
the chapter).
Figure 4.8: Falling in a fluid.
The resistance to motion of bodies in the air can be
assumed to be proportional to the square of the velocity,
unless the velocity is comparable to or greater than the
speed of sound in the air (340 m/s). Indeed, the viscosity
coefficient is 5 orders of magnitude smaller than the
density, leading to high Reynolds numbers. The Reynolds
number is only low if the velocity is too low, making the
air resistance force small, or in microscopic bodies.
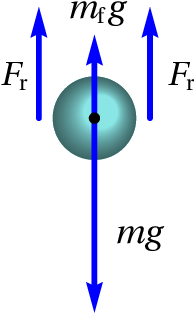
In the case of a free falling sphere in a fluid, the
external forces acting on it are: the weight,
, the
upward buoyant
force, which according to Archimedes' principal is equal to the
weight of the fluid that the sphere displaces,
, and the fluid resistance force. If the
density of the sphere is greater than the density of the
fluid, the weight
is greater than the buoyant force
and the sphere falls. In that case, the
fluid resistance force points upwards and its magnitude is
given by either expressions 4.12
or 4.14. When the free fall occurs
in air, the resulting acceleration downward vertical
acceleration is
, where
is a constant and
. As shown in
problem 12
of chapter 1, the speed
reaches a limit value of
.
Questions
(To check your answer, click on it.)
A book lies at rest on a table. Which of the following
statements is correct:
There is no force acting on the book.
The book has no inertia.
There is no force acting on the table.
The book is in equilibrium.
The inertia of the book is equal to the inertia of the table.
Two metal balls are the same size but one weighs twice
as much as the other. The two balls are dropped
simultaneously, from the rest, from the top of a
building. How do the times the two balls take to reach the
ground compare?
The heavier ball takes about half the time of the lighter ball.
The lighter ball takes about half the time of the heaviest ball.
Both times are similar, but the heavier ball takes less time than the lighter one.
Both times are similar, but the lighter ball takes less time than the heavier one.
The two balls take exactly the same time.
A big truck collides frontally with a small car. What of
the following states is true during the collision?
The
truck exerts a greater force on the car than the force
excerted by the car on the truck.
The
car exerts a greater force on the truck than the force
excerted by the truck on the car.
Neither
one exerts force on the other. The car is crushed simply
because it was in the path of the truck.
The truck exerts force on the car, but the car does not exert any force on the truck.
The truck exerts a force on the car and the car exerts the same force on the truck.
A stone is thrown vertically upwards. At the highest point of the trajectory of the stone:
Its velocity and acceleration point down.
Its velocity points upwards and its acceleration points downwards.
Its
velocity and acceleration are both zero.
Its
velocity is zero and its acceleration points down.
Its
velocity points downward and its acceleration is zero.
A woman pushes a large box with a constant horizontal
force. The force exerted by the woman causes the box to move
horizontally with constant speed
. We can then conclude
that the magnitude of force exerted by the woman:
Is
equal to the weight of the box.
Is
larger than the weight of the box.
Is
equal to the total force that opposes the movement of the box.
Is
larger than the total force that opposes the movement of the box.
Is
larger than the weight and the total force that opposes the movement of the box.
Problems
A 70 kg person climbs to the sixth floor
of a building using an elevator. The elevator starts from
rest on the ground floor, accelerates until the second
floor with uniform acceleration of 2 m/s2,
keeps the speed constant between the second and fourth
floors and slows down between the fourth and sixth floors
with uniform acceleration of −2
m/s2. Determine the magnitude of the normal
force in the person's feet in each part of the climb.
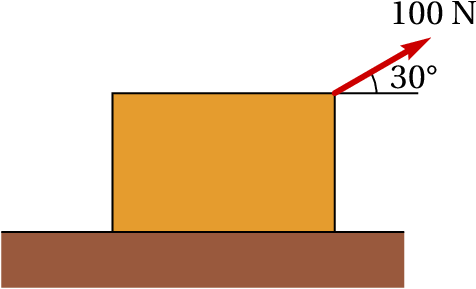
A block of mass 30 kg is on a horizontal
surface with coefficient of kinetic friction equal to
0.35. There is an external force of 100 N acting on the
block, which makes an angle of 30° with the
horizontal. Determine the value of the acceleration of the
block.
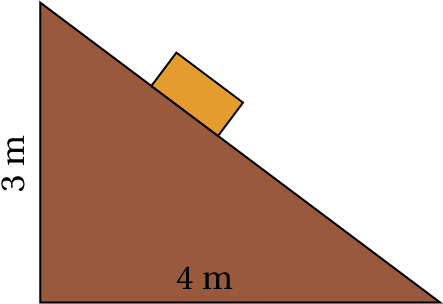
A block of mass
Kg slides
down the surface of an incline with 4 m of base and 3 m of
height. If the coefficient of kinetic friction between the
block and the surface of the incline is 0.25, compute the
value of the frictional force on the block.
An object with mass of 2 kg moves with
initial velocity
m/s, when an external force
(SI units) is applied during 5
seconds. Determine:
The final velocity after 5 seconds.
The impulse given by the external force during the 5
seconds.
A 72 kg man pushes an 8 kg wooden box on a
horizontal floor, exerting a horizontal force on it that
makes it slide on the floor. On the box is placed a book
with 0.6 kg. The man, the box and the book move together,
with acceleration equal to 0.5 m/s2. Determine
the values of the frictional forces between the floor and
the box, between the box and the book and between the
floor and the feet of the man, ignoring the air resistance
and knowing that the coefficients of static friction
(
) and kinetic friction (
)
are: between the floor and the box,
and
; between the box and the book,
and
; between
the ground and the feet of the man,
and
.
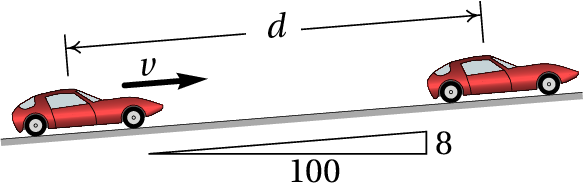
A 1230 kg car climbs an 8 percent slope
with constant speed. Determine:
The value of the total frictional force (sum of the
forces on the four tires).
The minimum value of the coefficient of static
friction between the road and the tires so that the
car can climb up the ramp.
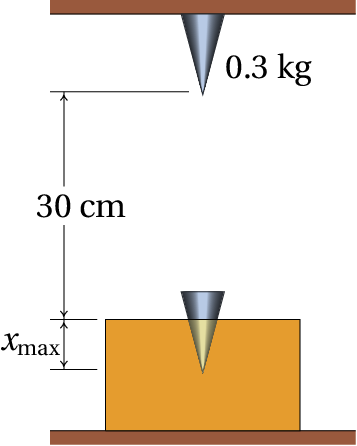
To determine the rigidity of a material, a
block of that material is place 30 cm below a metal cone
of 0.3 kg. The cone is allowed to fall freely from rest
then penetrating the block until it stops after moving a
distance
inside it. While the cone is
penetrating, the block exerts on it a force opposite to
its velocity directly proportional to the square of the
penetrated distance; that is, the magnitude of the force
is
, where
is the distance penetrated by the
tip of the cone and
is a positive constant that
measures the rigidity of the material. If the maximum
distance that the cone penetrates is
cm, determine the value of the
rigidity constant
for this material.
A sphere of radius
and density
falls freely inside a fluid with a
density
and viscosity coefficient
. (a) Find the expressions for the terminal
velocity when the resistance of the fluid is proportional
to the velocity and when it is proportional to the square
of the velocity. (b) Compute the terminal
velocities of a sphere of diameter 1 cm made of
steel, with density 7800 kg/m3, inside
glycerin, water and air. In each case determine the value
of the Reynolds number. Use the data in the following
table:
Fluid
Viscosity (kg/(m·s))
Density (kg/m3)
Glycerin
1.5
1200
Water
10−3
1000
Air
1.8×10−5
1.2
Compute the terminal velocity for free
fall in air of:
A raindrop with radius of 1 mm (use
1000 kg/m3 for the density of water).
A hail stone with a radius of 1 cm (the density of the ice is 917 kg/m3).
A table tennis ball with radius of 1.9 cm and mass of 0.0024 kg.
A tennis ball with radius of 3.25 cm and mass
of 0.062 kg. (Use the results of the previous
problem).
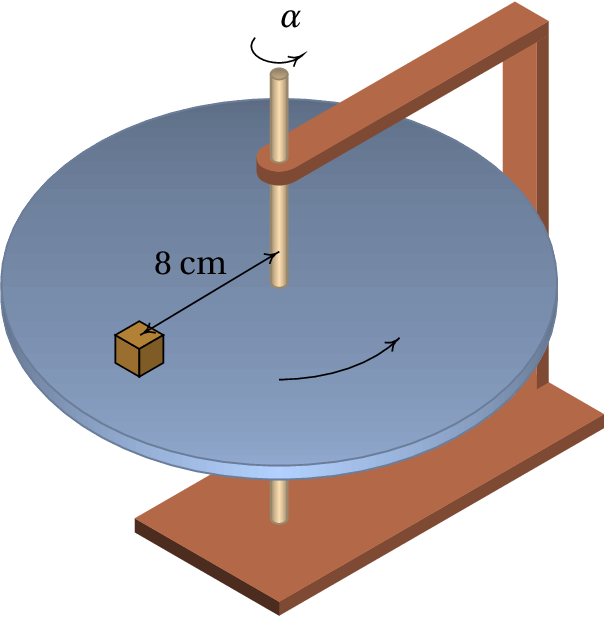
To measure the coefficient of static
friction between a block and a disc, the disc was rotated
with constant angular acceleration
rad/s2. The disc starts from rest at
and
at
s the block begins to skid over the
disk. Determine the value of the coefficient of static
friction.
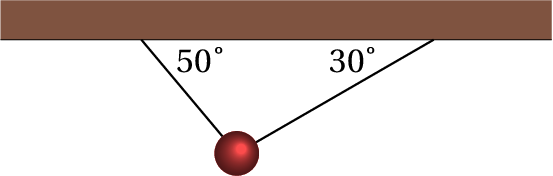
A ball with mass 0.8 kg is initially
kept at rest by two wires, as shown in the figure. The wire
on the left is suddenly cut off. Determine the tension on
the right-hand wire before the other wire was cut and the
exact instant after the wire is cut (assume that the wire
weights are negligible).
Answers
Questions: 1. D. 2. C. 3. E.
4. D. D. 5. C.
Problems
Between the gound level and the 2nd floor, 826
N. Between the 2nd and 4th floors, 686 N. Between the 4th
and 6th floors, 546 N.
0.040 m/s2
4.12 N.
(a) (
)
m/s. (b ) (
) N·s.
The frictional force between the box and the book is 0.3
N, the frictional force between the box and the floor is
16.856 N, and the frictional force between the floor and
the man's feet is 57.156 N.
(a) 961.2 N. (b) 0.08.
24 696 N / m 2 .
( a ) With resistance proportional to the speed:
.
With resistance proportional to
:
.
(b) In glycerin:
m/s,
; in water:
m/s,
; in air:
m/s,
.
(a) 6.60 m/s = 23.7 km/h. (b) 20.0 m/s =
71.9 km/h. (c) 8.25 m/s = 29.7 km/h. (d) 24.7
m/s = 88.8 km/h.



(Click to continue)