Um hoverboard tem apenas um eixo e duas rodas. A pessoa no
hoverboard pode rodar com ele à volta do eixo, tal como um
pêndulo. O pêndulo tem duas posições de equilíbrio, quando o seu
centro de gravidade se encontra na mesma linha vertical que passa pelo
eixo. O ponto de equilíbrio por baixo do eixo é ponto de equilíbrio
estável e se o centro de gravidade estiver próximo desse ponto, o
pêndulo oscila. No caso do hoverboard, o centro de gravidade
encontra-se próximo do ponto de equilíbrio por cima do eixo, que é um
ponto de equilíbrio instável; como tal, a pessoa rodará, caindo para o
chão, ou para a frente ou para trás. O sistema de controlo automático
do motor desloca o hoverboard e a pessoa na direção necessária
para evitar essa queda. Um pêndulo com o seu centro de gravidade
próximo do ponto de equilíbrio instável (por cima do eixo), chama-se
pêndulo invertido. Um
hoverboard, um segway e um monociclo são
exemplos de pêndulos invertidos.
10.1. Aproximação linear
Nos sistemas dinâmicos com duas variáveis de estado:
(10.1)
cada uma das funções
e
podem ser escritas na forma de uma
série de Taylor, na vizinhança de um ponto qualquer (
,
) do
espaço de fase:
(10.2)
onde o índice
pode ser 1 ou 2. Se o ponto (
,
) é um ponto de
equilíbrio, então
e, portanto, o primeiro termo
das duas séries é nulo. Mudando a origem de coordenadas para o ponto
de equilíbrio (
,
), isto é, num novo sistema de coordenadas:
,
, as funções são, aproximadamente,
(10.3)
Ou seja, uma combinação linear das novas variáveis
e
, onde as
constantes são os valores das derivadas parciais no ponto de
equilíbrio (
,
). Substituindo essas aproximações no
sistema 10.1, obtém-se um sistema linear (
e
, porque
e
são constantes).
(10.4)
esta aproximação linear é válida apenas numa vizinhança da origem
(
,
), ou seja, quando
e
estejam próximas de
e
.
A matriz quadrada na equação 10.4
chama-se matriz jacobiana e representa-se
por
. Substituindo as coordenadas (
,
) do
ponto de equilíbrio na matriz jacobiana, obtém-se uma matriz
constante. Por cada ponto de equilíbrio existe uma matriz de
coeficientes constantes, que define o sistema linear que aproxima bem
o sistema não linear na
vizinhança do ponto de equilíbrio. Os valores e vetores próprios de
cada uma dessas matrizes permitem analisar a estabilidade do sistema,
na vizinhança de cada ponto de equilíbrio, da mesma forma que é feito
para os sistemas lineares.
Exemplo 10.1
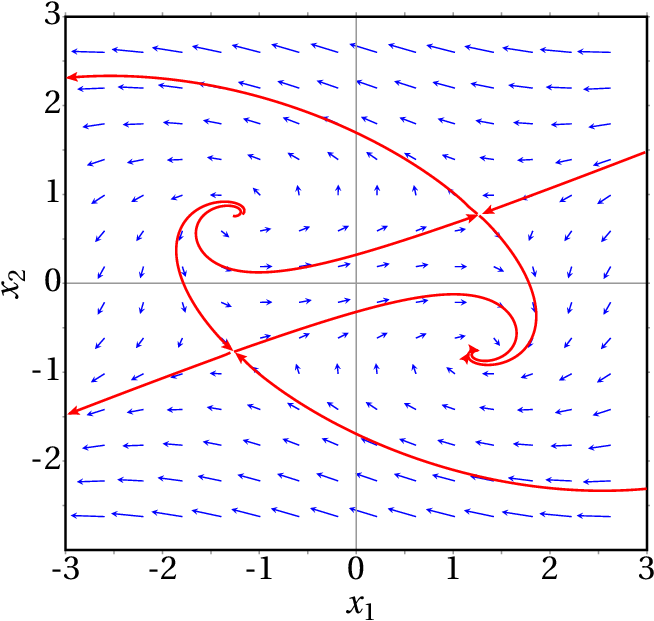
Classifique os pontos de equilíbrio e represente o retrato de fase do
sistema:
Resolução. Já foi demonstrado no exemplo 7.2 do
capítulo 7, que este sistema tem quatro pontos
de equilíbrio. As funções
e
e os pontos de equilíbrio são
armazenados em duas listas assim:
Convém definir também outra lista com os nomes das variáveis de estado:
(%i3)v: [x1, x2]$
A matriz jacobiana, com duas linhas e duas colunas, obtem-se com o
comando jacobian do Maxima, que
precisa de duas listas: uma lista com as funções e outra lista com os
nomes das variáveis
(%i4)J: jacobian (f,v);
(%o4)
Substituindo as coordenadas dos pontos de equilíbrio, obtêm-se as matrizes
dos sistemas lineares que aproximam o sistema na vizinhança de
cada um desses pontos. Por exemplo, no primeiro ponto de equilíbrio,
(%i5)subst (equilibrio[1], J);
(%o5)
Para estudar a estabilidade do sistema na vizinhança desse ponto de
equilíbrio, calculam-se os valores próprios dessa matriz.
(%i6)eigenvectors (%)$ (%i7)float (%);
(%o7)
,
O resultado mostra 4 listas; a primeira lista são os valores próprios,
a segunda lista são as multiplicidades de cada valor próprio, e as
últimas duas listas são os vetores próprios.
Nesse ponto de equilíbrio os valores próprios são reais, com sinais
opostos; conclui-se que é um ponto de sela. O quarto ponto de
equilíbrio também é ponto de sela:
Como os valores próprios são complexos, com parte real negativa, o
ponto de equilíbrio é um foco atrativo (estável). Cálculos semelhantes
para o terceiro ponto de equilíbrio mostram que também é um foco, mas
repulsivo (instável), porque os valores próprios são complexos, com
parte real positiva. O retrato de fase constrói-se usando o comando:
(%i14)plotdf (f, v, [x1,-3,3], [x2,-3,3])$
Na figura 10.1 mostra-se o resultado. Existe um único ponto
de equilíbrio estável, um foco atrativo, em (
,
) = (1.265,
-0.7746). Os outros 3 pontos de equilíbrio, dois pontos de sela e um
foco repulsivo, são instáveis. As duas curvas de evolução que foram
traçadas a sair do foco repulsivo em (
,
) = (-1.265, 0.7746)
e a continuação dessas curvas passando pelos pontos de sela, delimitam
a região de estabilidade, em que se o estado inicial do sistema
estiver nessa região, o estado final aproximar-se-á do ponto de
equilíbrio estável.
Figura 10.1: Retrato de fase do sistema
,
.
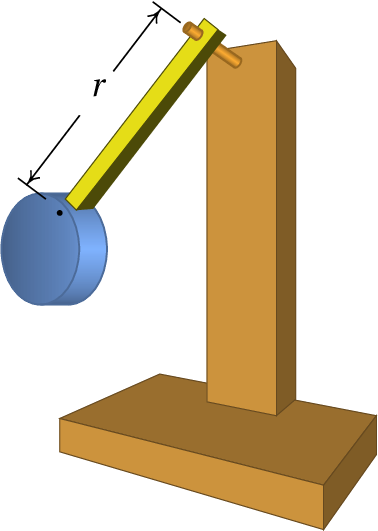
10.2. O pêndulo
Figura 10.2: Pêndulo.
O tipo de pêndulo estudado nesta secção é
formado por um objeto ligado a uma barra rígida atravessada por um
eixo horizontal fixo (figura 10.2). Esse tipo de pêndulo
pode rodar num plano vertical dando voltas completas. O sistema tem um
único grau de liberdade,
, que é o ângulo que a barra faz com
a vertical. Seja
quando o pêndulo está na posição mais
baixa e
na posição mais alta. A velocidade angular é
e a velocidade do centro de massa é
onde
é a distância desde o centro de massa até o eixo.
A energia cinética é:
(10.5)
Onde
é a massa total e
o momento de inércia em
relação ao centro de massa. De acordo com o teorema dos eixos
paralelos 5.28, o momento de inércia em relação ao eixo do
pêndulo é
, que pode ser escrito
, onde
é o raio de
giração em relação ao eixo. Como tal, a energia cinética é
(10.6)
A energia potencial gravítica é (arbitrando energia nula em
)
(10.7)
Ignorando a resistência do ar, a equação de Lagrange conduz à equação
de movimento:
(10.8)
onde
define o comprimento eficaz do pêndulo. No
caso particular dum pêndulo simples,
em que a massa da barra é desprezável e o objeto é pequeno,
é a
distância desde o objeto até o eixo (ver exemplo 8.5 do
capítulo 8).
As equações de evolução obtêm-se substituindo a derivada de
pela velocidade angular
:
(10.9)
Estas equações não lineares não podem ser resolvidas analiticamente,
mas podem ser resolvidas por aproximação numérica. O comando
rk do Maxima usa-se para obter a solução
numérica pelo método de Runge-Kutta de quarta ordem; é necessário dar
4 argumentos ao comando: uma lista de expressões para as componentes
da velocidade de fase, uma lista com os nomes das variáveis de estado,
uma lista com valores iniciais para essas variáveis e um intervalo de
valores para a variável independente, incluindo o nome dessa variável,
valor inicial, valor final e valor dos incrementos nesse intervalo. O
comando rk produz uma lista de pontos que aproximam a solução;
cada ponto terá as coordenadas da variável independente, seguida pelas
variáveis de estado.
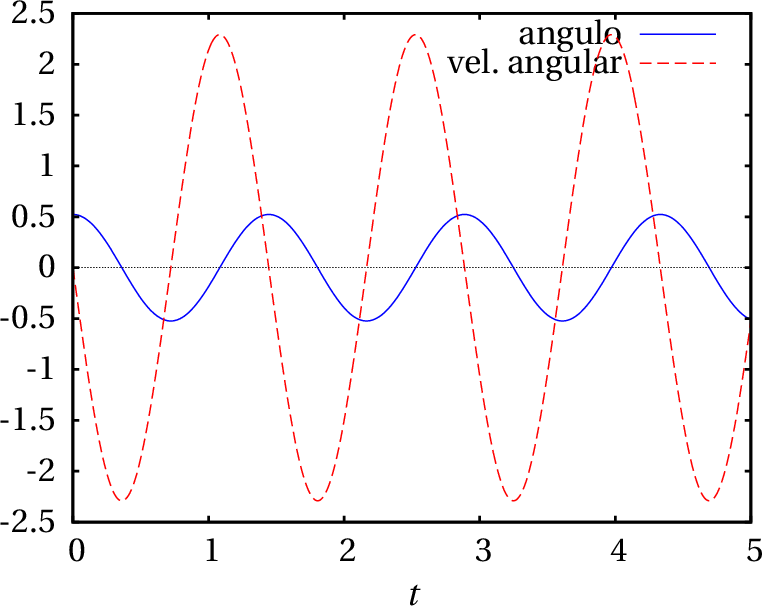
Por exemplo, para um pêndulo com
igual a 50 cm, largado do repouso
com ângulo inicial de 30°, a solução aproximada é obtida com
(
e
representam
e
):
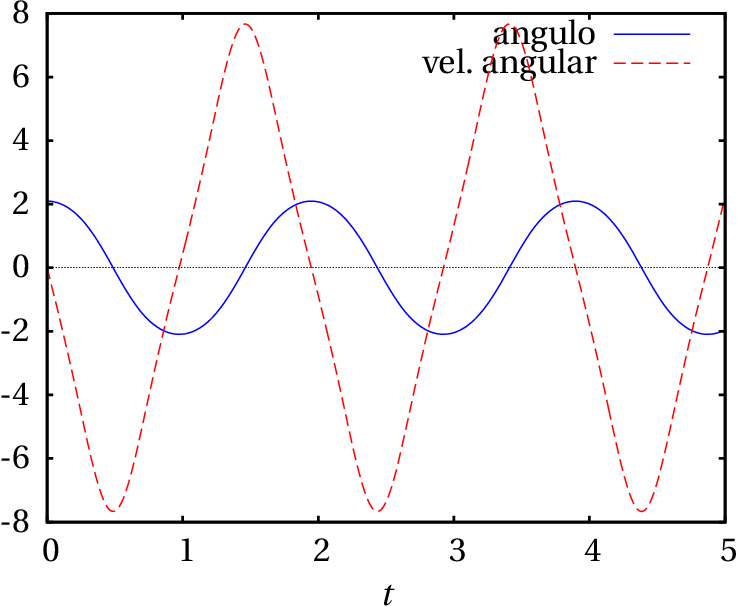
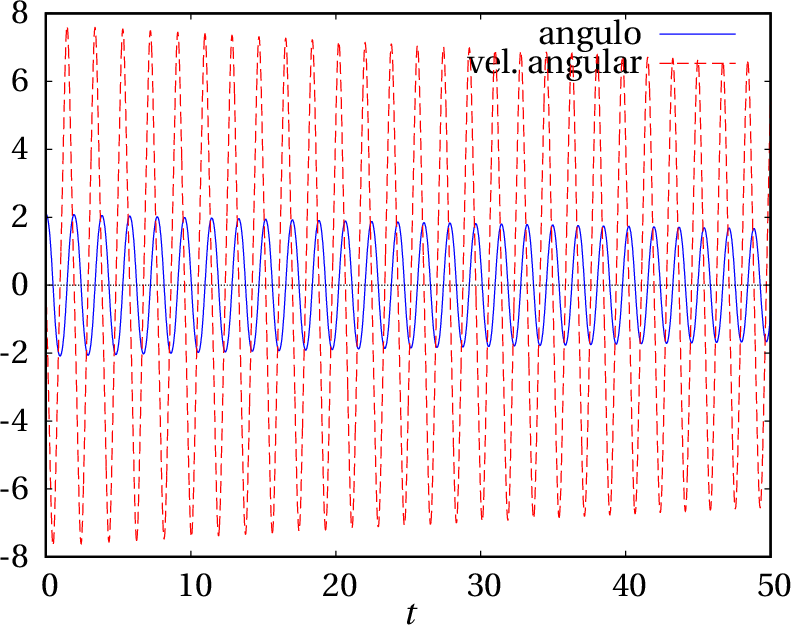
Figura 10.3: Oscilações de um pêndulo de 50 cm com amplitude de 30°.
A lista de dados numéricos obtida permite concluir que o período de
oscilação está entre 1.44 s e 1.45 s. Os gráficos na
figura 10.3 são muito parecidos com os gráficos de um
oscilador harmónico simples. Se o ângulo inicial for maior, essa
semelhança começa a desaparecer. Por exemplo, a figura 10.4
mostra os resultados obtidos com ângulo inicial de 120°.
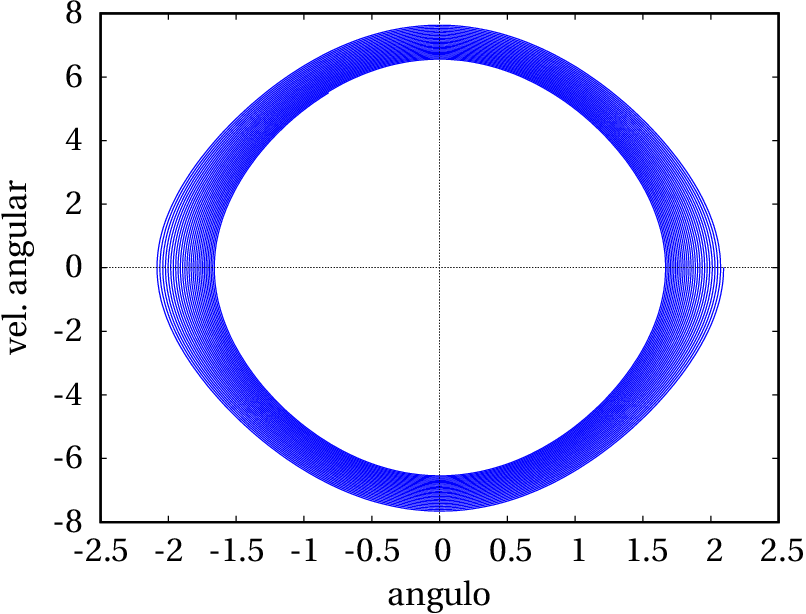
Figura 10.4: Oscilações de um pêndulo de 50 cm com amplitude de 120°.
Nesse caso conclui-se a partir dos dados numéricos que o período de
oscilação aumenta, em relação à amplitude de 30° e está entre
1.94 s e 1.95 s.
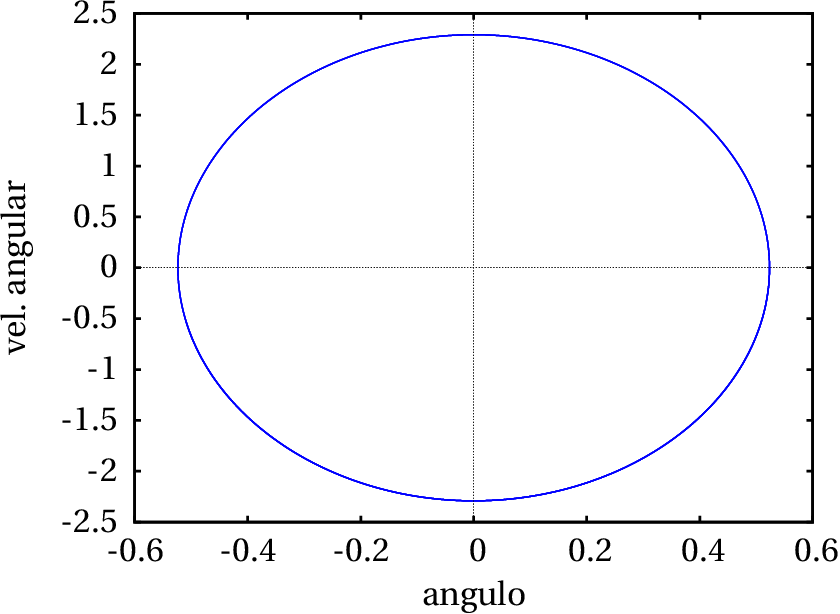
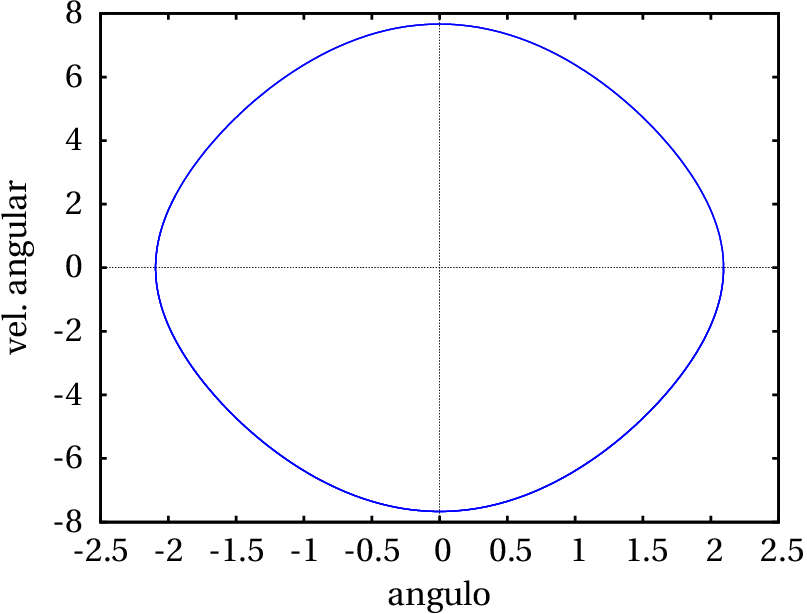
Nos dois casos apresentados nas figuras 10.3 e
10.4, a curva de evolução é um ciclo, indicando que existe
um ponto de equilíbrio estável na região interna do ciclo.
Os pontos de equilíbrio do pêndulo, onde os lados direitos das
equações 10.9 são nulos, encontram-se em
,
,
… e
.
Os pontos em
,
,
… são
realmente o mesmo ponto físico, na posição mais baixa do pêndulo,
correspondentes à passagem do pêndulo por essa posição, após um número
qualquer de voltas. Os pontos em
,
…
são também o mesmo ponto físico, na posição mais alta do pêndulo.
10.3. Aproximação linear do pêndulo
A matriz jacobiana correspondente às equações 10.9 do pêndulo é
(10.10)
No ponto de equilíbrio em
(em geral, 0,
,
,…), a matriz é:
(10.11)
que é a matriz de um oscilador harmónico simples, analisada no
exemplo 9.4
do capítulo 9. Os dois
valores próprios são
, o ponto de equilíbrio
é um centro e se o estado inicial do sistema está
próximo desse ponto, o pêndulo oscila com frequência angular
. No caso do pêndulo de 50 cm analisado na
secção anterior, essa expressão conduz ao período 1.42 s. Lembre-se
que esse valor é apenas uma aproximação, que é melhor quanto menor for
a amplitude; os valores do período calculados numericamente na secção
anterior são mais realistas.
Na vizinhança do ponto de equilíbrio
(em geral,
,
,…), a matriz jacobiana é
(10.12)
que é a matriz de um oscilador invertido, analisada no
exemplo 9.3 do capítulo 9. Os dois
valores próprios são
e o ponto de equilíbrio é ponto
de sela (equilíbrio instável).
O retrato de fase no intervalo
, mostrará 3 centros
(
, 0 e
) e 4 pontos de sela (
,
,
e
). No caso
cm considerado na secção anterior, usa-se o
comando:
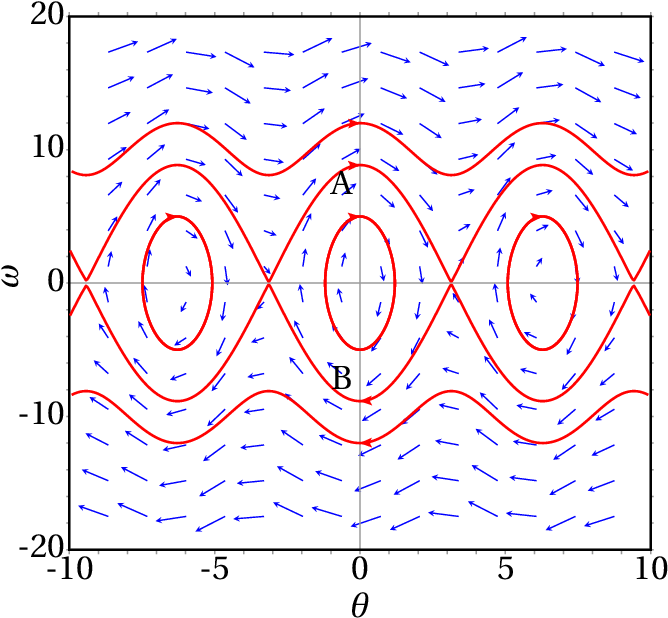
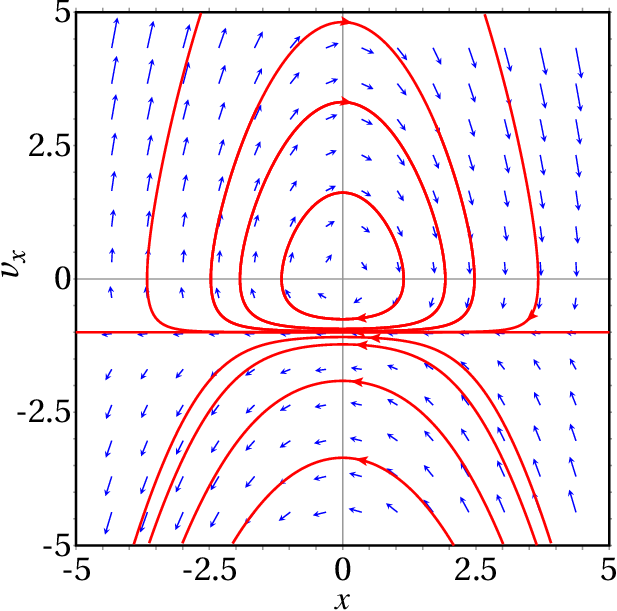
O resultado é a figura 10.5. No eixo das abcissas está
representado o ângulo
e no eixo das ordenadas a velocidade
angular
. As duas curvas identificadas com as letras A e B
formam parte de uma órbita heteroclínica.
Figura 10.5: Retrato de fase de um pêndulo de 50 cm.
A órbita heteroclínica do pêndulo corresponde ao caso em que a energia
mecânica do pêndulo é exatamente igual à energia potencial gravítica
no ponto de altura máxima. Usando como referência
, na posição em
que a barra do pêndulo está na horizontal (
), a energia
potencial no ponto mais alto é
. Cada uma das curvas A e B
corresponde ao movimento em que inicialmente o pêndulo está parado na
posição mais alta, desce completando uma oscilação completa e para
novamente na posição mais alta, sem voltar a oscilar mais. A diferença
entre a órbita heteroclínica e os ciclos, é que nos ciclos as
oscilações repetem-se indefinidamente, enquanto que na órbita
heteroclínica há apenas uma oscilação.
Dentro da órbita heteroclínica, os ciclos na sua vizinhança
correspondem a oscilações em que o pêndulo chega quase até o ponto
mais alto, parece ficar parado nesse ponto por alguns instantes e logo
desce novamente até o ponto mais baixo, repetindo o movimento no outro
lado da vertical.
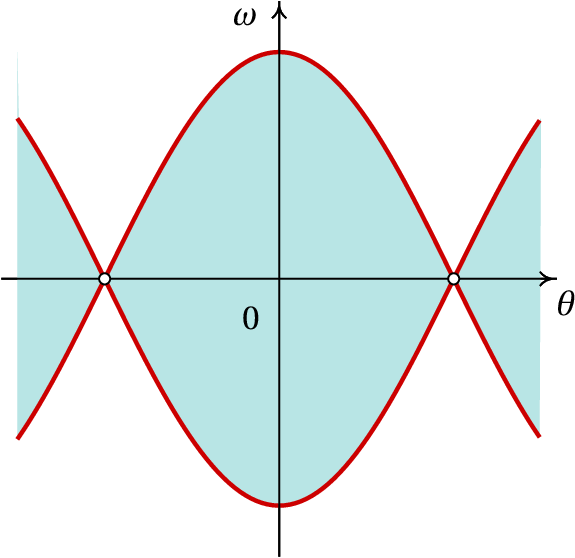
As órbitas heteroclínicas também são
separatrizes no retrato de fase, porque
delimitam a região onde existe movimento oscilatório: região sombreada
na figura 10.6. Se o estado inicial está dentro dessa
região, o pêndulo oscila; caso contrário, o pêndulo descreve movimento
circular não uniforme.
Figura 10.6: As órbitas heteroclínicas delimitam a região de movimento
oscilatório.
As figuras 10.3 e 10.4 mostram que com amplitude
30° a aproximação linear é bastante boa, pois a curva de
evolução é muito parecida à do oscilador harmónico simples e o período
é próximo do período obtido com a aproximação linear, mas com
amplitude de 120°, a aproximação linear já não é muito boa.
10.4. Espaços de fase com várias dimensões
Nos sistemas mecânicos autónomos, por cada grau de liberdade há uma
equação de movimento, que implica duas variáveis de estado. Assim
sendo, a dimensão do espaço de fase é o dobro do número de graus de
liberdade. Se um sistema não é autónomo é necessário acrescentar mais
uma dimensão ao espaço de fase, como se mostra na seguinte
secção. Existem então sistemas mecânicos com espaços de fase de
dimensão 2, 3, 4, 5, …
Nos casos em que o espaço de fase tem mais do que duas dimensões o
programa plotdf não pode ser utilizado para esboçar o retrato
de fase. É necessário resolver as equações de evolução para alguns
valores iniciais específicos e construir gráficos mostrando apenas
algumas das variáveis de estado.
10.4.1. Sistemas de equações não autónomas
A forma geral de um sistema com
equações diferenciais não
autónomas é:
Para caraterizar cada possível estado do sistema é necessário saber os
valores das
variáveis
e o valor do tempo; ou seja, cada
estado é um ponto com
coordenadas (
,
,…,
,
) e o espaço de fase tem
dimensões e o tempo é também
variável de estado. As componentes da velocidade de fase são as
derivadas das variáveis de estado: (
,
,…,
,
). As expressões para as primeiras
componentes são dadas pelo sistema de
equações diferenciais acima
e a última componente
é sempre igual a 1 (derivada de
em
ordem a
). Como tal, o sistema de
equações não autónomas
considera-se é equivalente a um sistema autónomo com
variáveis
de estado.
Esse tipo de sistemas de equações podem ser resolvidos também com o
comando rk, sem ser necessário indicar
como variável de
estado, nem a última componente da velocidade de fase,
;
o valor inicial de
dá-se no intervalo de integração e não na lista
de valores iniciais das variáveis de estado. No entanto, há que ter em
conta que se a velocidade de fase depende da variável independente
, essa variável é também variável de estado.
Exemplo 10.2
A equação diferencial:
é uma equação de Bessel. Escreva a equação
como sistema dinâmico e identifique o espaço de fase.
Resolução. Define-se uma variável auxiliar
igual a
:
(10.13)
assim sendo, a segunda derivada
é igual à primeira derivada
de
e a equação de Bessel é:
resolvendo para
, obtém-se:
(10.14)
Como esta equação não é autónoma, considera-se a variável independente
como mais uma variável de estado, com a equação de evolução
trivial:
(10.15)
O espaço de fase tem três dimensões e cada estado tem coordenadas (
,
,
). O sistema dinâmico é definido pelas 3 equações 10.13,
10.14 e 10.15.
10.4.2. Lançamento de projéteis
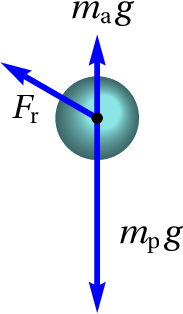
Figura 10.7: Projétil no ar.
No caso do lançamento de um projétil com velocidade oblíqua, sobre o
corpo atuam três forças externas: o peso,
, a
resistência do ar,
e a impulsão
, onde
é a massa do projétil e
a massa do ar
que ocupava o mesmo volume do projétil. O problema é semelhante ao
problema da queda livre, estudado na secção 4.3.3 do
capítulo 4, mas a força de resistência do ar
deixa de ser vertical (ver figura 10.7). O peso e a impulsão
são verticais, em sentidos opostos, podendo ser combinados numa única
força vertical (peso eficaz) de módulo
.
Admite-se que a massa volúmica do projétil é muito maior que a massa
volúmica do ar e, portanto, o peso eficaz aponta para baixo e
é quase igual a
. De
qualquer modo, a massa do projétil costuma medir-se medindo o seu peso
eficaz no ar, assim que o valor medido (
) da massa do projétil é
realmente
e o peso eficaz é
.
A força de resistência do ar muda constantemente de sentido, porque é
sempre tangente à trajetória e no sentido oposto à velocidade. Como
foi explicado no capítulo 4, no caso do ar o número de Reynolds
costuma ser elevado e admite-se que a resistência do ar é proporcional
ao quadrado da velocidade. Se o projétil é uma esfera de raio
, a
expressão do módulo de
é dada pela
equação 4.14 e a força é:
(10.16)
onde
é a massa volúmica do ar e
é o versor
tangencial, na direção e sentido do vetor velocidade:
(10.17)
Escolhendo um sistema de eixos em que a gravidade aponta no sentido
negativo do eixo dos
e a velocidade inicial
com que é
lançado o projétil está no plano
, o peso e a força de resistência
do ar estão sempre no plano
e o movimento do projétil dá-se nesse
plano. Assim sendo, o vetor velocidade é
e a força de resistência do ar
é:
(10.18)
O vetor do peso é
. Aplicando a segunda lei de
Newton, obtêm-se as componentes da aceleração:
(10.19)
Estas equações devem ser resolvidas em simultâneo porque as duas
componentes
e
aparecem nas duas equações. É impossível
encontrar a solução exata do problema, mas pode obter-se uma
aproximação numérica.
A seguir vão-se comparar as trajetórias de duas esferas diferentes,
lançadas com a mesma velocidade inicial para compará-las com a
trajetória parabólica que teriam se pudessem ser lançadas no vácuo,
sem resistência do ar. Considere-se o caso em que a velocidade inicial
é 12 m/s, fazendo um ângulo de 45° com o plano horizontal; as
componentes da velocidade inicial são,
Começando pelo caso mais fácil, o lançamento dos projéteis no vácuo,
as componentes da aceleração são
e
. O estado do
projétil é (
,
,
,
) e a velocidade de fase (
,
,
,
). Os valores iniciais da velocidade já foram
calculados em (%i19) e arbitre-se que o projétil parte da
origem com valores iniciais nulos para
e
. Para integrar as
equações de movimento desde
até
s, com incrementos de
0.01 s, usa-se o comando:
As 5 componentes do ponto são o tempo, as coordenadas da posição e as
componentes da velocidade. Este resultado mostra que em
a bola
já está a cair, porque
é negativa e que já desceu debaixo da
altura inicial, porque
é negativa.
Como pretendemos obter a trajetória até a bola regressar à altura
, é necessário extrair unicamente os pontos da lista tr1
com terceira componente (
) positiva. Percorre-se a lista toda,
comparando o terceiro elemento de cada ponto com 0, até encontrar o
primeiro ponto em que o terceiro elemento é negativo. Isso consegue-se
usando o comando sublist_indices do Maxima:
Usou-se lambda que define um operador;
neste caso esse operador compara o terceiro elemento da entrada que
lhe for dada com zero. O comando sublist_indices percorre a
lista tr1 passando cada elemento como entrada para esse
operador e, nos casos em que o operador produz o resultado "true", o
índice do respetivo elemento da lista é acrescentado a uma sub
lista. O comando first seleciona apenas o
primeiro elemento nessa sub lista, neste caso, o índice do primeiro ponto
em que
é negativo. Como tal, só interessam os primeiros 174 pontos
na lista; se o objetivo é construir o gráfico da trajetória, cria-se
outra lista com as coordenadas
e
dos primeiros 174 pontos:
(%i23)r1: makelist ([tr1[i][2], tr1[i][3]], i, 1, 174)$
A seguir vai repetir-se o mesmo procedimento para uma bola de ténis e
uma bola de ténis de mesa, tendo em conta a resistência do ar. A massa
volúmica do ar é aproximadamente 1.2 kg/m3. É conveniente definir
uma função que calcula a constante que aparece nas equações de
movimento 10.19, em função do raio e a massa de cada uma das
bolas; também é conveniente definir a expressão do módulo da
velocidade para não ter que escrevê-la várias vezes:
Uma bola de ténis típica tem raio de aproximadamente 3.25 cm e massa
62 gramas. No comando (%i20) é necessário substituir a
aceleração da gravidade pelas duas componentes da aceleração
(equações 10.19)
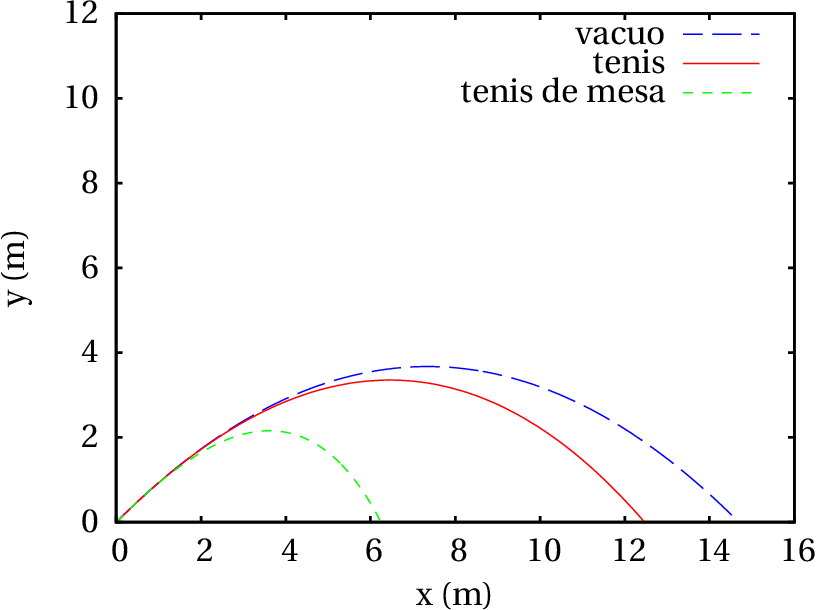
Figura 10.8: Trajetórias de uma bola no vácuo e bolas de ténis e ténis de
mesa no ar.
As trajetórias das bolas no ar não são parábolas, mas no fim curvam-se
mais e terminam com uma queda mais vertical. O efeito da resistência
do ar é mais visível na bola de ténis de mesa; apesar de ser mais
pequena que a bola de ténis, a força de resistência do ar produz nela
maior aceleração tangencial negativa, devido à sua menor massa
volúmica. Lançadas com a mesma velocidade, o alcance horizontal da
bola de ténis de mesa é 6.2 m e o da bola de ténis 12.4 m. O alcance
horizontal hipotético das duas bolas, se a resistência do ar pudesse
ser ignorada, seria 14.7 m.
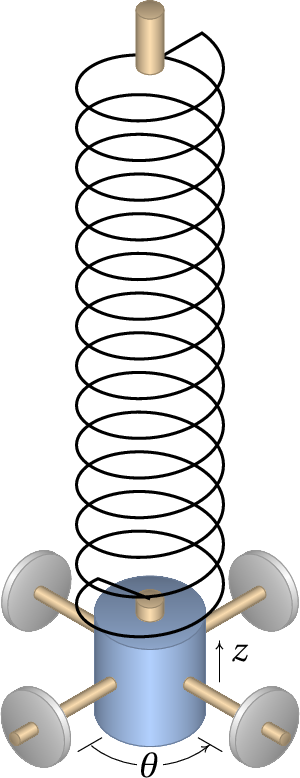
10.4.3. Pêndulo de Wilberforce
Figura 10.9: Pêndulo
de Wilberforce.
O pêndulo de Wilberforce
(figura 10.9) é constituído por um cilindro pendurado de uma
mola vertical muito comprida. Quando uma mola é esticada ou
comprimida, cada espira muda ligeiramente de tamanho; no pêndulo de
Wilberforce, o número elevado de
espiras na mola faz com que seja mais visível essa mudança, de forma
que enquanto a mola oscila, também se enrola ou desenrola, fazendo
rodar o cilindro em relação ao eixo vertical.
O sistema tem dois graus de liberdade, a altura
do centro de massa
do cilindro e o ângulo de rotação do cilindro à volta do eixo
vertical,
. Se
e
são escolhidos na posição de
equilíbrio, é possível ignorar a energia potencial gravítica que
poderá ser eliminada das equações com uma mudança de variáveis
(problema 4 do capítulo 9). A
energia potencial elástica tem 3 termos, que dependem da elongação da
mola
e do seu ângulo de rotação
; as energias cinética e
potencial são,
(10.20)
em que
,
e
são constantes elásticas da mola. As equações de
Lagrange, ignorando a resistência do ar e outras forças dissipativas,
conduzem às seguintes equações de movimento:
(10.21)
Para resolver as equações de evolução numericamente, é necessário dar
alguns valores típicos para a massa, o momento de inércia e as
constantes elásticas,
(%i33)[m, I, k, a, b]: [0.5, 1e-4, 5, 1e-3, 0.5e-2]$
A solução no intervalo de tempo desde 0 até 40, com condição inicial
cm e as outras variáveis iguais a 0, obtém-se com o seguinte
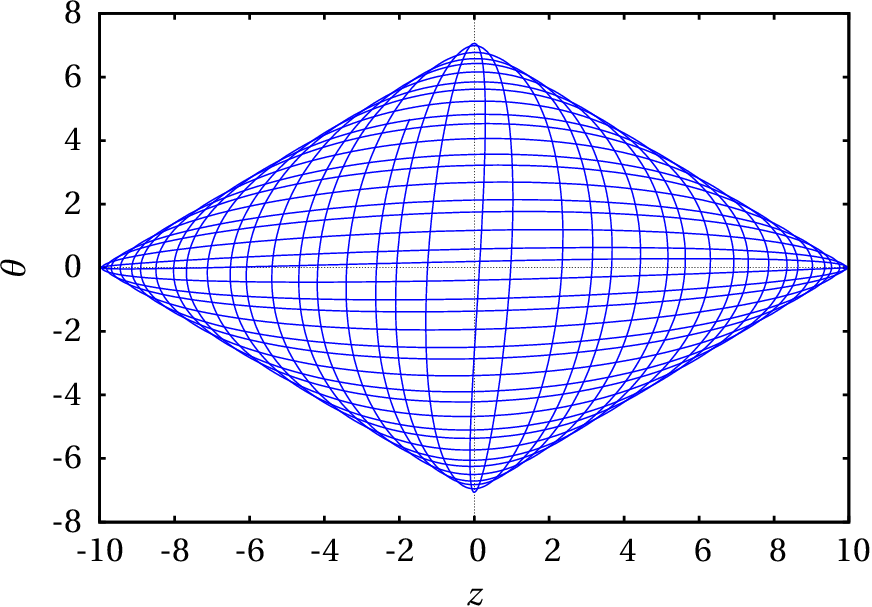
comando:
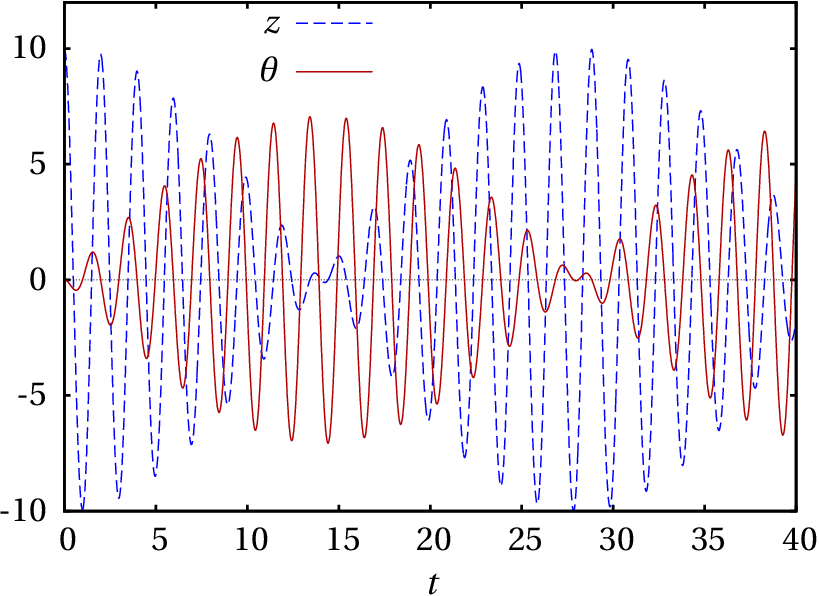
A figura 10.10 mostra o gráfico obtido para o ângulo
e a elongação
, multiplicada por um fator de 100 para que
seja visível na mesma escala do ângulo.
Figura 10.10: Elongação e ângulo de rotação no pêndulo de Wilberforce.
O gráfico mostra uma caraterística interessante do pêndulo de
Wilberforce: se o pêndulo é posto a oscilar, sem rodar, a amplitude
das oscilações lineares decresce gradualmente, enquanto que o cilindro
começa a rodar com oscilações de torção que atingem uma amplitude
máxima quando o cilindro deixa de se deslocar na vertical. A amplitude
das oscilações de torção começa logo a diminuir à medida que a
oscilação linear cresce novamente. Essa intermitência entre
deslocamento vertical e rotação repete-se indefinidamente.
A projeção do retrato de fase nas variáveis
e
é
apresentada na figura 10.11.
Figura 10.11: Retrato de fase no plano formado pela elongação e o ângulo.
Neste sistema existem duas frequências angulares. A frequência angular
longitudinal e a frequência angular de torção,
(10.22)
O cilindro num pêndulo de Wilberforce costuma ter quatro porcas que
podem ser deslocadas, aumentando ou diminuindo o momento de inércia,
para conseguir que as duas frequências sejam muito parecidas e o
efeito de alternância entre oscilações lineares e rotacionais seja
mais visível. Os valores dos parâmetros usados no exemplo acima, foram
escolhidos de forma a garantir duas frequências iguais.
Perguntas
(Para conferir a sua resposta, clique nela.)
O valor aproximado do período de um pêndulo com comprimento
é
, onde
é a aceleração da gravidade. Essa expressão
é uma boa aproximação unicamente em algumas situações. Se o ângulo
é zero no ponto de equilíbrio estável, qual das condições
seguintes garante que essa expressão seja uma boa aproximação do seu
valor real?
valor máximo da velocidade angular pequeno.
aceleração da gravidade pequena.
comprimento
pequeno.
valores máximos do ângulo e da velocidade angular pequenos.
valor máximo do ângulo pequeno.
A força tangencial numa partícula com velocidade
e posição na
trajetória
é:
. Quantos pontos de
equilíbrio tem esse sistema?
1
2
3
4
0
Qual é a matriz jacobiana do sistema
,
?
As equações de evolução de um sistema dinâmico no espaço de fase (
,
), são
,
. Qual dos seguintes vetores
aponta na direção e sentido da velocidade de fase em (1, 2)?
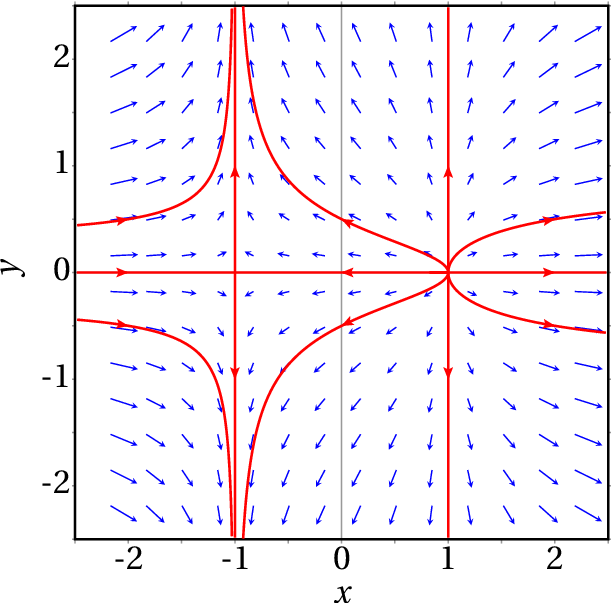
No retrato de fase na figura, que tipo de ponto de equilíbrio é o
ponto (1,0)?
nó atrativo
foco repulsivo
ponto de sela
foco atrativo
nó repulsivo
Problemas
Uma partícula com massa
, desloca-se ao longo do eixo dos
sob a
ação de uma força resultante
que depende da posição
e da
componente da velocidade
. Para cada um dos casos seguintes
encontre os pontos de equilíbrio, diga que tipo de ponto equilíbrio é
cada um (estável ou instável; centro, foco, nó ou ponto de sela) e
desenhe o retrato de fase mostrando as órbitas mais importantes:
(a)
(b)
Em cada um dos casos seguintes encontre os pontos de equilíbrio e os
valores próprios da matriz jacobiana nesses pontos e identifique os
tipos de pontos de equilíbrio:
(a)
(b)
(c)
(d)
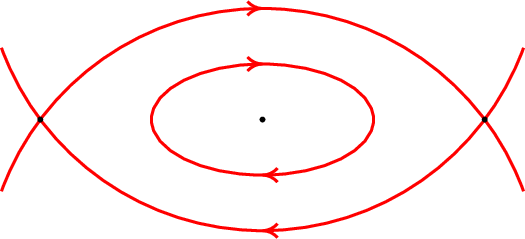
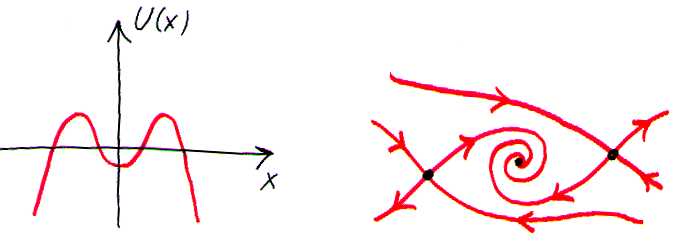
O diagrama mostra o retrato de fase de um sistema com unicamente 3
pontos de equilíbrio, no caso idealizado em que não existe
atrito. Faça (a mão) um esboço da energia potencial e de como seria o
retrato de fase do sistema real, considerando as forças de atrito.
A amplitude de oscilação de um pêndulo decresce, devido à força de
resistência do ar e ao atrito no eixo. Admita um pêndulo de
comprimento
cm e massa
kg, em que o atrito no
eixo é desprezável mas a resistência do ar não. A equação de movimento
é a equação 8.8
Se a massa
estiver concentrada numa esfera de raio
cm, a
expressão para a constante
é dada pela equação 4.14:
, onde
kg/m3 é a massa
volúmica do ar. Trace os gráficos de
,
e da
curva de evolução no espaço de fase e explique o significado físico da
solução, para os dois casos seguintes:
(a) O pêndulo parte do repouso com um ângulo inicial
.
(b) O pêndulo é lançado desde
, com
velocidade angular inicial
s−1.
A base do pêndulo da figura 10.2 roda no plano horizontal,
com velocidade angular constante
, enquanto o pêndulo
oscila.
(a) Demonstre que a equação de movimento é:
onde
é a distância do centro de massa até o eixo e o comprimento
eficaz
é o raio de giração ao quadrado, sobre
.
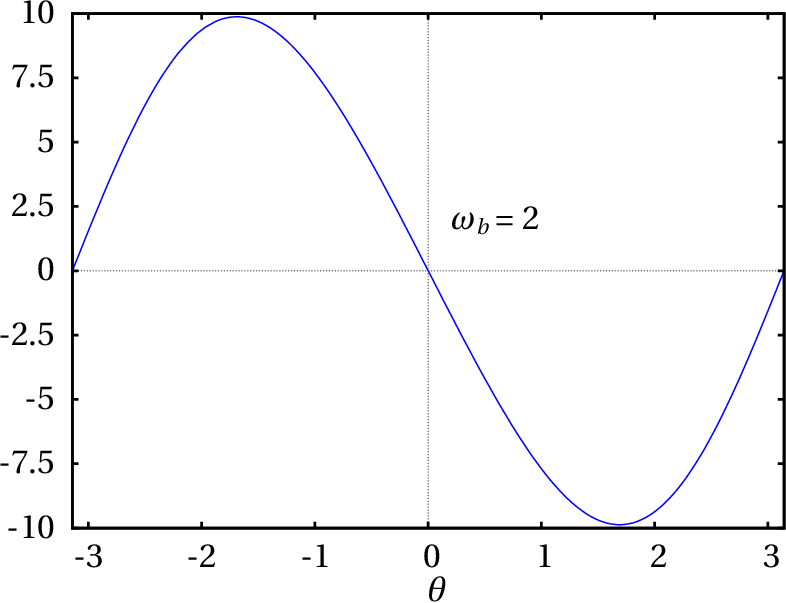
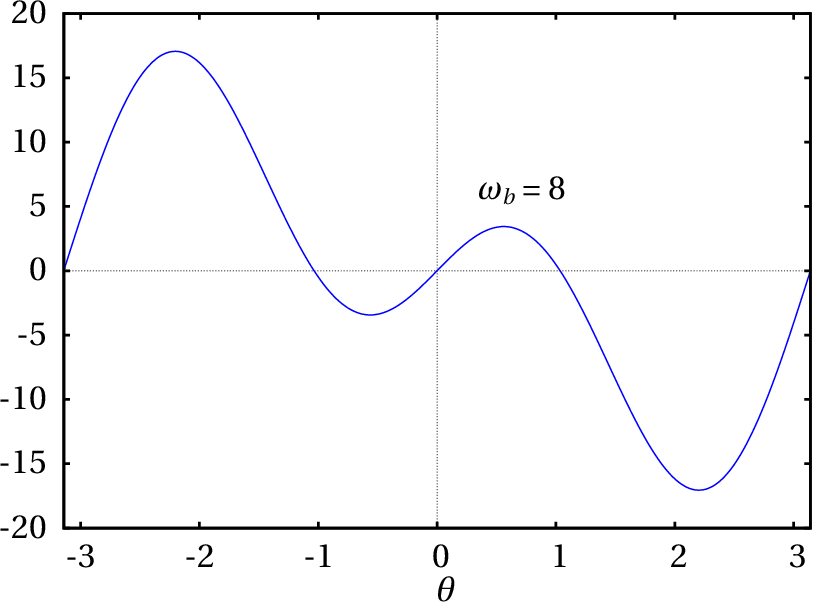
(b) Trace o gráfico de
em função de
, entre
e
, para um pêndulo com
m e
s−1. Repita o gráfico para
s−1. Com base nos dois gráficos,
identifique em cada caso os pontos de equilíbrio estável e instável.
(c) Demonstre que quando
, existe um
único ponto de equilíbrio estável em
e um único ponto de
equilíbrio instável em
.
(d) Se
, demostre que os pontos de
equilíbrio em
e
são ambos instáveis e
aparecem dois pontos de equilíbrio estável em
, onde
é um ângulo entre zero e
.
Na trajetória da bola de ténis de mesa calculada na
secção 10.4.2, o alcance horizontal da bola é
aproximadamente o valor da coordenada
do último ponto da lista de
pontos r1. Repita os cálculos, com diferentes valores do
ângulo de lançamento, para determinar os valores do alcance com
ângulos de 35°, 36°, 37°, 38°, 39°
e 40°. Registe numa tabela os valores obtidos para o alcance
horizontal, em função do ângulo, com precisão até os milímetros. Com
base na tabela, qual é o ângulo de lançamento que produz o maior
alcance horizontal? Usando o resultado do problema 12 do
capítulo 6, mostre que no vácuo o ângulo que
produz o alcance máximo é 45°.
Para analisar a equação diferencial não linear
,
(a) Escreva as equações de evolução do sistema dinâmico
associado à equação.
(b) Encontre os pontos de equilíbrio do sistema.
(c) Determine a matriz jacobiana.
(d) Caracterize cada um dos pontos de equilíbrio.
(e) Se em
os valores da variável
e da sua derivada
são
e
, determine (numericamente) os valores da
variável e da sua derivada em
.
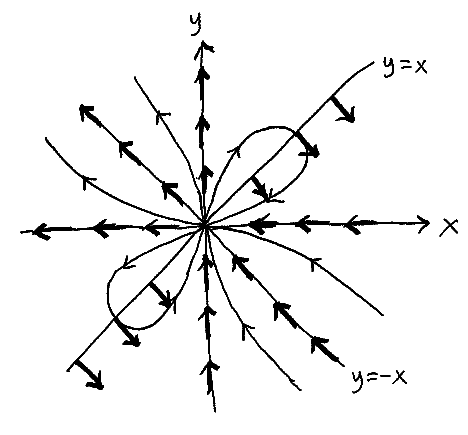
O sistema dinâmico com equações de evolução:
tem um único ponto de equilíbrio na origem. A matriz jacobiana nesse
ponto é igual a zero e, portanto, os valores próprios (nulos) não
podem ser usados para caraterizar o ponto de equilíbrio. Use o
seguinte método para analisar o retrato de fase do sistema:
(a) Determine o versor na direção da velocidade de fase em
qualquer ponto do eixo dos
e em qualquer ponto do eixo dos
.
(b) Determine o versor na direção da velocidade de fase em
qualquer ponto das duas retas
e
.
(c) Faça a mão um gráfico mostrando os versores que encontrou
nas alíneas a e b, em vários pontos nos 4 quadrantes do
espaço de fase, e trace algumas curvas de evolução seguindo as
direções da velocidade de fase. Com base nesse gráfico, que tipo de
ponto de equilíbrio julga que é a origem?
(d) Diga se existem ciclos, órbitas homoclínicas ou
heteroclínicas e, caso a resposta seja afirmativa, quantas.
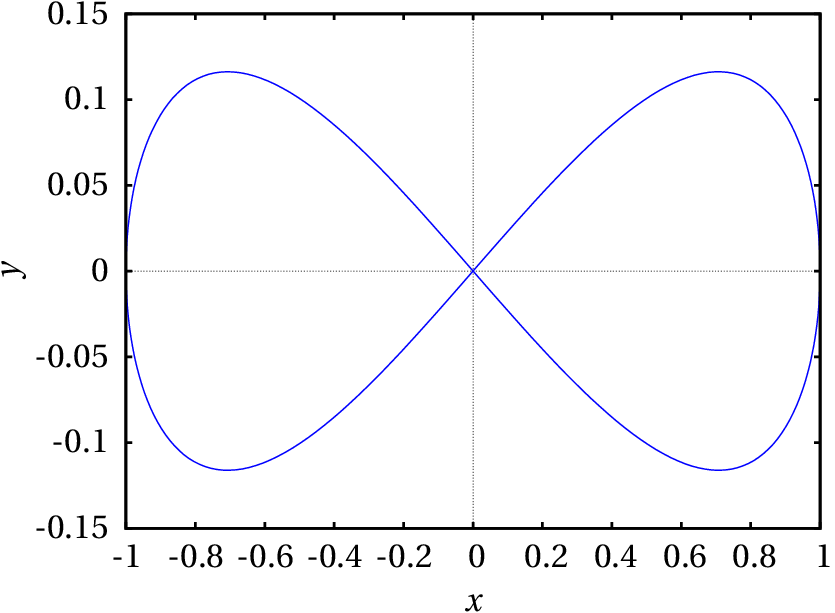
Uma partícula de massa
desloca-se no plano
sob a ação de uma
força conservativa com energia potencial,
onde
e
são duas constantes positivas. As trajetórias da
partícula obtidas com diferentes valores dessas constantes chamam-se
figuras de Lissajous.
(a) Encontre as duas equações de movimento para
e
(b) Resolva numericamente as equações de movimento, no caso
,
e
(unidades SI), entre
e
, se a
partícula partir do ponto (1, 0) com velocidade inicial
. Trace o gráfico da trajetória da
partícula no plano
.
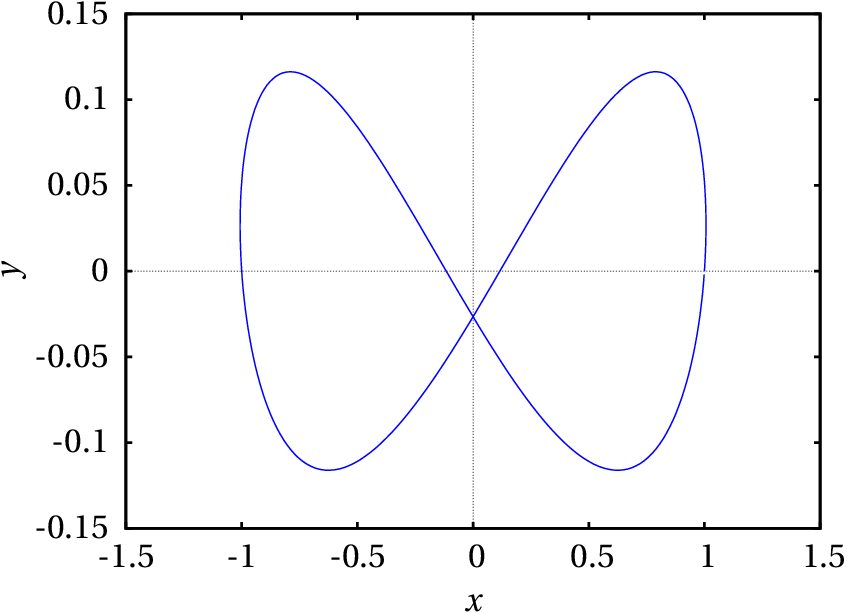
(c) Repita a alínea anterior, mas admitindo que a partícula
parte do ponto (1, 0) com velocidade inicial
.
(d) Observe que o sistema pode ser considerado como um conjunto
de dois osciladores harmónicos independentes, nas direções
e
. Calcule o período de oscilação para cada um dos dois osciladores
e diga qual é a relação entre os dois períodos.
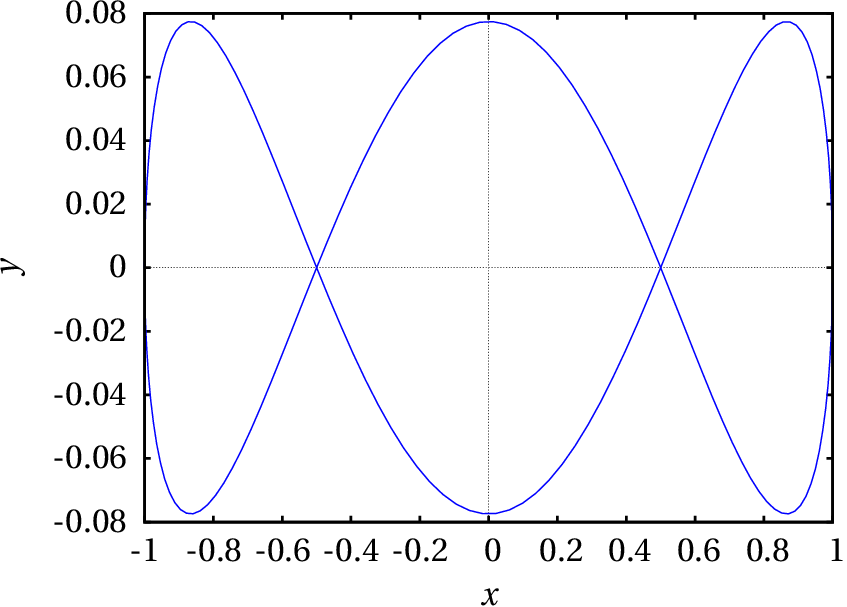
(e) Repita os cálculos da alínea c, mudando o valor de
para 18. Que relação observa entre os gráficos da trajetória e
?
Qualquer corpo celeste (planeta, cometa, asteroide, sonda espacial,
etc) de massa
no sistema solar tem uma energia potencial gravítica
produzida pelo Sol, que é responsável pelas órbitas elípticas desses
corpos. A expressão para a energia potencial é,
onde
é a constante de gravitação universal,
é a massa do Sol,
e as coordenadas
e
são medidas no plano da órbita do corpo
celeste, com origem no Sol. Se as distâncias forem medidas em unidades
astronómicas, UA, e os tempos em anos, o produto
será igual a
.
(a) Encontre as equações de movimento do corpo celeste, em
unidades de anos para o tempo e UA para as distâncias.
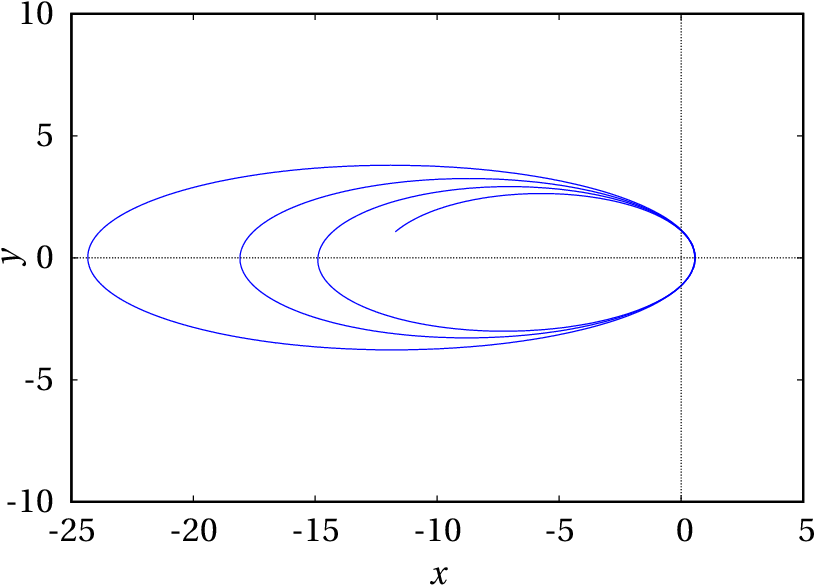
(b) O cometa Halley aproxima-se até uma distância mínima do Sol
igual a 0.587 UA. Nesse ponto, a sua velocidade é máxima, igual a
11.50 UA/ano, e perpendicular à sua distância até o Sol. Determine
numericamente a órbita do cometa Halley, a partir da posição inicial
, com velocidade inicial
,
com intervalos de tempo
anos. Trace a órbita desde
até
anos. Que pode concluir acerca do erro numérico?
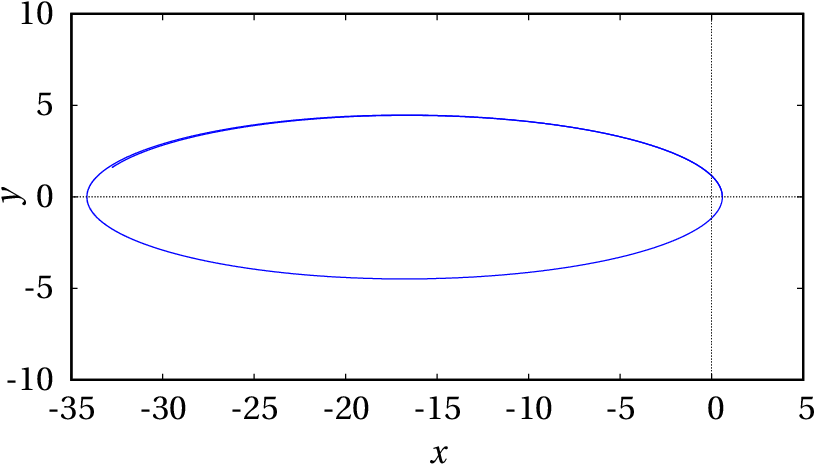
(c) Repita o procedimento da alínea anterior com
anos e trace a órbita desde
até
anos. Que pode concluir acerca do erro numérico?
(d) Diga qual é, aproximadamente, a distância máxima que o
cometa Halley se afasta do Sol, e compare a órbita do cometa com as
órbitas do planeta mais distante, Neptuno (órbita entre 29.77 UA e
30.44 UA) e do planeta mais próximo do Sol, Mercúrio (órbita entre
0.31 UA e 0.39 UA. Plutão já não é considerado um planeta).
Respostas
Perguntas:1. D. 2. A. 3. C. 4. D. 5. E.
Problemas
(a) Unicamente um centro em (
,
) = (0, 0).
(b) Um ponto de sela em (
,
)=(0, 0), um foco instável em
(
,
)=(-1, 0) e um foco estável em (
,
)=(1, 0).
(a) Dois pontos de equilíbrio: (3, -5), com valores próprios
7 e -4, é ponto de sela; (-4, 2), com valores próprios 3 e -7 é
ponto de sela.
(b) Dois pontos de equilíbrio: (0, 0), com valores próprios
é centro; (0.763, 0.874), com valores próprios
-2.193 e 2.736 é ponto de sela.
(c) Dois pontos de equilíbrio: (
,
)
e (
,
), ambos pontos de sela com valores
próprios
.
(d) Nove pontos de equilíbrio. Um ponto de sela em (0, 0), com
valores próprios 3 e -5, outros dois pontos de sela em (
,
) e (
,
), com valores próprios 10 e
-12, outros dois pontos de sela em (
,
) e
(
,
) com valores próprios 4 e -6 e quatro
focos atrativos em (
,
), (
,
), (
,
) e (
,
),
com valores próprios
, onde
e
.
Os pontos de sela continuam sendo pontos de sela e o centro passa a
ser foco estável.
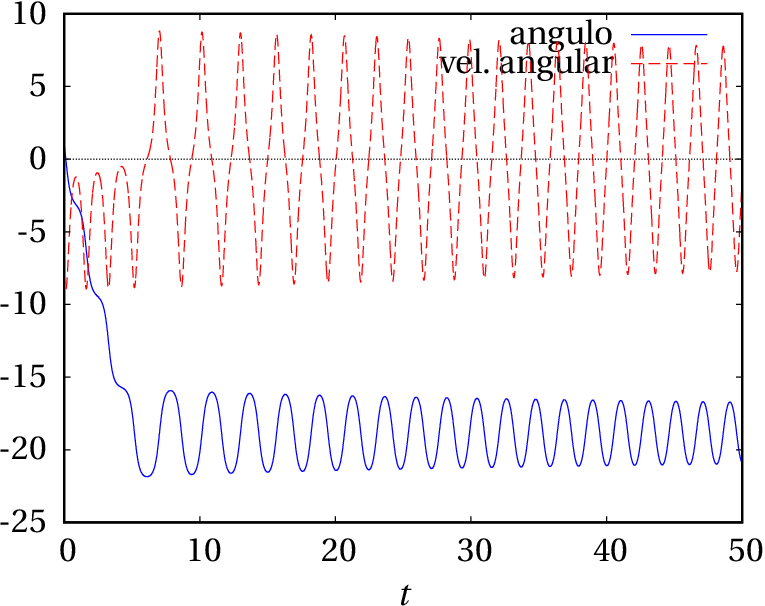
(a) O pêndulo oscila com amplitude que decresce lentamente:
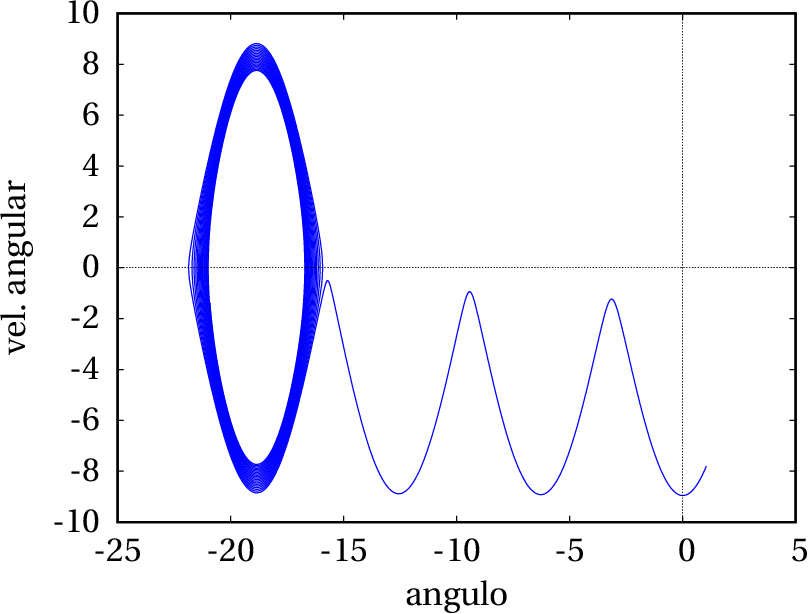
(b) O pêndulo faz três voltas completas, rodando no sentido
horário, e quando passa a quarta vez pela posição de equilíbrio
estável, começa a oscilar com amplitude que decresce lentamente:
(b)
Com
s−1, há um ponto de equilíbrio estável
em
e um ponto de equilíbrio instável em
.
Com
s−1, há dois pontos de equilíbrio instável
em
e
e dois pontos de equilíbrio estável em
e
.
Ângulo
Alcance (m)
35°
6.293
36°
6.299
37°
6.301
38°
6.299
39°
6.325
40°
6.314
O ângulo de 37° produz o alcance máximo. No
problema 12 do capítulo 6, o valor
máximo do seno é 1, quando
; e, portanto,
.
(a)
,
(b) (
,
)
= (1, 0) e (
,
) = (-1, 0)
(c)
(d) (1, 0) é um centro e (-1, 0) é ponto de sela.
(e)
,
.
(a) No eixo dos
,
. No eixo dos
,
. (b) Na reta
,
. Na reta
,
. (c) Ver figura; a
origem é ponto de sela. (d) Nenhum ciclo nem órbita
heteroclínica; número infinito de órbitas homoclínicas (todas as
curvas de evolução no primeiro e terceiro quadrantes).
(a)
(b) e (c)
(d) Na direção
, 2.433 s. Na direção
, 1.217 s. O período
na direção
é o dobro do período na direção de
. (e) Se
for um número inteiro, o estado da partícula regressa ao
estado inicial depois de descrever uma figura de Lissajous com
loops segundo o eixo dos
.
(a)
(b) e (c)
Na alínea b o erro numérico é muito elevado; a energia do
cometa não permanece constante mais diminui. Na alínea c o erro
numérico é muito menor, mas o cometa continua a perder energia; seria
necessário reduzir ainda mais o valor de
para diminuir o
erro. (d) 34.4 UA. A órbita sai por fora da órbita de Neptuno,
e entra até um ponto entre órbitas de Mercúrio e Vénus.
Pergunta 1, resposta A: Errada
Velocidade máxima pequena não implica que o pêndulo
esteja próximo do ponto de equilíbrio estável, porque num
pêndulo com
elevado,

 (b) Um ponto de sela em (
,
)=(0, 0), um foco instável em
(
,
)=(-1, 0) e um foco estável em (
,
)=(1, 0).
(b) Um ponto de sela em (
,
)=(0, 0), um foco instável em
(
,
)=(-1, 0) e um foco estável em (
,
)=(1, 0).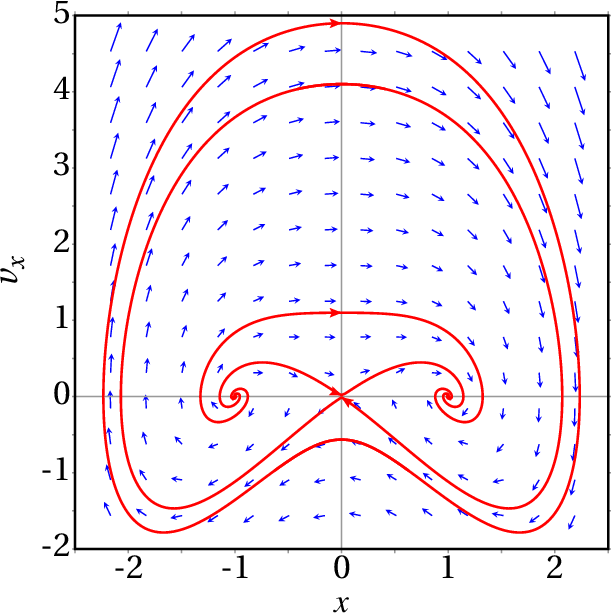
Velocidade máxima pequena não implica que o pêndulo esteja próximo do ponto de equilíbrio estável, porque num pêndulo com elevado,
(clique para continuar)