In a pole vault, the kinetic energy of the initial race is
converted into elastic potential energy of the folded
pole. As the pole recovers it straight form, this elastic
potential energy is transformed into gravitational potential
energy. At the instant the pole is in a vertical line, the
initial kinetic energy of the run has become gravitational
potential energy; the jumper still pushes down the pole,
increase its gravitational potential energy even more and
going higher. Finally, the jumper releases the pole and
falls freely, letting its gravitational potential energy
become kinetic energy.
where
is the resultant of all external forces,
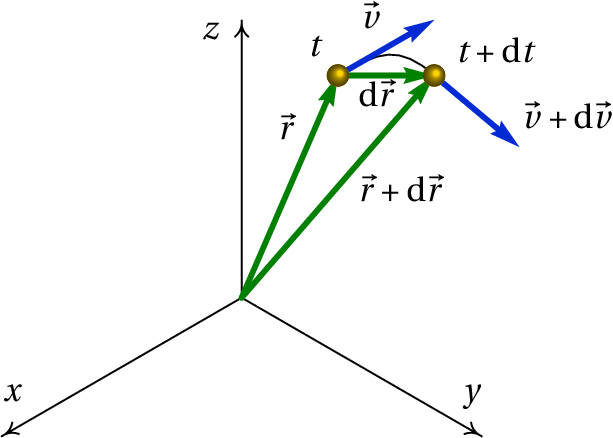
leads to a useful relation called the work and kinetic
energy theorem. To derive this theorem, consider an
infinitesimal vector displacement
during an infinitesimal interval of time
(Figure 6.1 ).
Figure 6.1: Position and velocity vectors in an instant
and at a later time
.
In the limit when
goes to zero, the vector
displacement is in the tangential direction and with
magnitude equal to the displacement along the
trajectory:
(6.2)
Using this expression and multiplying with scalar product
the two sides of equation 6.1 by
the infinitesimal displacement, we obtain
(6.3)
The kinematic equation
implies that
is equal to
and hence,
(6.4)
Integrating the two sides of the equation from a position
, where the velocity is
, to another position
where the velocity is
, we obtain the work and
kinetic energy theorem:
(6.5)
The function of the speed:
(6.6)
Is called kinetic
energy and the integral of the tangential component of the
force along the trajectory is called work:
(6.7)
The work and kinetic energy theorem states that
The work done by the resultsnt force, along the
trajectory, is equal to the increase of the kinetic
energy of the particle.
It should be noted that in general the work of a force can
be calculated by integrating
along any curve, but if this curve is not the trajectory of
the particle, the result may not be equal to the increase in
kinetic energy. In general, a line integral between two
points produces different results for different curves
joining these points.
Only the tangential component of the resultant force does work
along the trajectory and can change the kinetic energy of the
particle. The normal component of the resultant force
doesn't do any work and doesn't change the kinetic energy of
the particle.
Work and kinetic energy both have units of energy, that is,
joules in the International System of Units (1 J = 1 N·m).
In cartesian coordinates, the infinitesimal displacement
is,
(6.8)
Example 6.1
A cannon fires a spherical bullet with radius of 5 cm
from the terrace of a building, from the initial position
(in meters):
And with initial speed (meters per second):
Determine the maximum height reached by the bullet and
the position where the bullet hits the ground (height
equal to zero).
Resolution. This is the same problem as
example 2.2
that has already been solved
in chapter 2, but we
will now solve it through work and impulse. A
metal bullet has a density approximately 8 times greater
than that of water. Under these conditions, the terminal
velocity of the bullet is of the order of 132 m/s. The
problem will be solved by ignoring the air resistance and in
the solution obtained we will be compare the maximum
velocity with the terminal velocity. A value of the maximum
velocity much smaller than the terminal velocity will
confirm that the air resistance is indeed negligible.
In the system of axes of the figure, the weight is written
and the impulse it produces from the moment
the bullet is released,
, and a later instant
is,
Equating the impulse to the increase of the quantity of
motion and dividing by the mass, we obtain:
(6.9)
Therefore, the
and
components of the velocity
remain constant. The speed will have a minimum value at the
instant
such that
. The minimum value of
the speed is then
and it corresponds to the point of maximum height.
The work performed by the weight is:
Equating to the variation of the kinetic energy and
dividing by the mass,
(6.10)
We can now obtain the maximum height
by
replacing
by the minimum speed
To determine the position where the bullet hits the ground,
we the speed with which the bullet hits the ground,
substituting
in equation 6.10:
And, according to equation 6.9,
the square of the speed is:
Where it was taken into account that
is
positive. During that time, the horizontal displacement is
equal to:
,
since the horizontal component of the velocity is
constant. Adding the values of the
and
components in
the initial position, we obtain the position where the
bullet hits the ground:
Note that the results are slightly different from those
obtained in
Example 2.2. In
both cases the intermediate results were presented rounding
up to 4 significant digits, but all calculations were done
using double-precision floating point format (16 significant
digits). The difference is that although the time it takes
for the bullet to hit the ground appears to be the same in both
cases (3.855 s) the stored values in double precision are
different because different methods have been used and the
numerical error is different in both cases.
The maximum speed, reached when the bullet hits the ground,
is 34.55 m/s. Since this value is much smaller than the
terminal velocity (132 m/s), the solution obtained ignoring
the air resistance will not be too far from the true
solution.
The work and kinetic energy theorem contains only a part of
the information contained in Newton's second law, since the
vector equation 6.1 is actually 3
equations (one for each component) conveniently grouped into
vectors. However, it is possible to extract the same three
equations from the kinetic energy. Taking into account
that:
(6.11)
Then the three cartesian components of
equation 6.1 are obtained as
follows:
(6.12)
And in an analogous way for the
and
components. This equation will be generalized to other
system of coordinates, different from cartesian, and to
non-inertial frames,
in chapter 8.
6.2. Conservative forces
A force
which depends solely on the
position
is called conservative, if its line
integral between two points in the positions
and
,
(6.13)
gives the same result along any curve from
to
.
Therefore, it is possible to choose an arbitrary position
and define a function
at any position:
(6.14)
notice that this definition implies
at the position
.
The function
cannot be defined when the result of the line
integral in 6.14 is not uniquely defined,
namely, when the integral gives different results from different
paths. The choice of the negative sign in the definition will be
explained later. The function
, with units of energy, is called
the potential
energy associated with the conservative force
. The advantage of defining potential energies is that
is a scalar function, simpler than the vector function
, which allows to fully characterize the force. That
is, given the potential energy function, it is possible to find the
expression of the associated force.
The definition of the potential energy implies that the line
integral of the conservative force
is the same as:
(6.15)
This result is called the
work and potential energy theorem:
The work done between two points by a conservative
force is equal to the decrease of the potential energy
associated with that force.
Note that the work is equal to the decrease in potential
energy, not its increase, due to the use of the negative
sign in the definition of the potential energy. It should
also be noted that
definition 6.14 implies that the
potential energy has zero value at the reference position
. The effect of changing the reference position
is to add or subtract a constant from
at all
points, but the potential energy differences,
, are
independent of the position used as reference. The numerical
value of the potential energy at a point has no physical
meaning; what has significance is the difference in
potential energy values at two points.
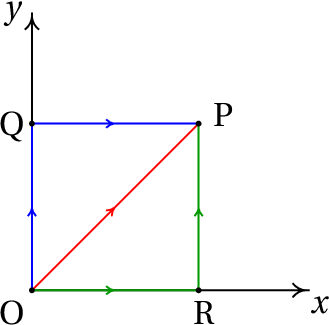
Example 6.2
Compute the line integral of the force
, from the origin O to the
point P in the
plane, with coordinates
, using
the 3 paths indicated in the figure: C1 is the
line segment
(R with
coordinates
,
), followed by the straight
segment
, C2
is the straight segment
(Q with coordinates
,
), followed by the
straight segment
and
C3 is the straight segment
.
Resolution. The vector equation of the line segment
is:
, with
. Hence, the
infinitesimal displacement along this segment is
And the line integral along this segment is:
The equation of the segment
is
,
, the
infinitesimal displacement is
, and the line integral in this
segment is equal to:
The line integral in path C1 is then equal to 1.5.
The equation of the segment
is
,
and the line
integral along that segment is then,
The equation of the segment
is
,
and the line
integral along that segment is,
The line integral along the path C2 is then
equal to 2.5.
In the segment
,
is
equal to
and, therefore, the equation of that segment
is
,
. The line integral along path C3 is then
Since the integral is different along the three curves
considered, the force
is not conservative.
In Example 6.1 it was possible
to calculate the line integral of the weight without knowing
the parabolic trajectory equation of the cannonball, because
as the weight
is always in the direction of
, the scalar product
Is always equal to
, for any displacement in any
direction, and the line integral reduces to an ordinary
integral in a single variable.
In general, whenever the dot product
depends on a single
variable, the force
is conservative, because the
line integral reduces to an ordinary integral and the result
depends only on the values of that variable in the initial
and final positions. The following sections show some
examples.
6.2.1. Gravitational potential energy
Using a coordinate system in which the
axis is
vertical and pointing upwards, the weight is
(6.16)
The dot product
is equal to
. Therefore, the weight is a
conservative force and
the gravitational potential energy can be
defined as:
(6.17)
That is, the gravitational potential energy of a body is
equal to the product of its weight and its height. The
heights can be measured from any point chosen as
reference.
6.2.2. Elastic potential energy
When an elastic spring is stretched or compressed, it
exerts an elastic
force
at both ends, in the direction
and senses that cause the spring to return to its original
shape. Being
the spring deformation, equal to its
current length minus the length it would have when it is
neither stretched nor compressed, the absolute value of
is directly proportional
to
(6.18)
where
is the elastic
constant of the
spring. Equation 6.18 is
called Hooke's
law.
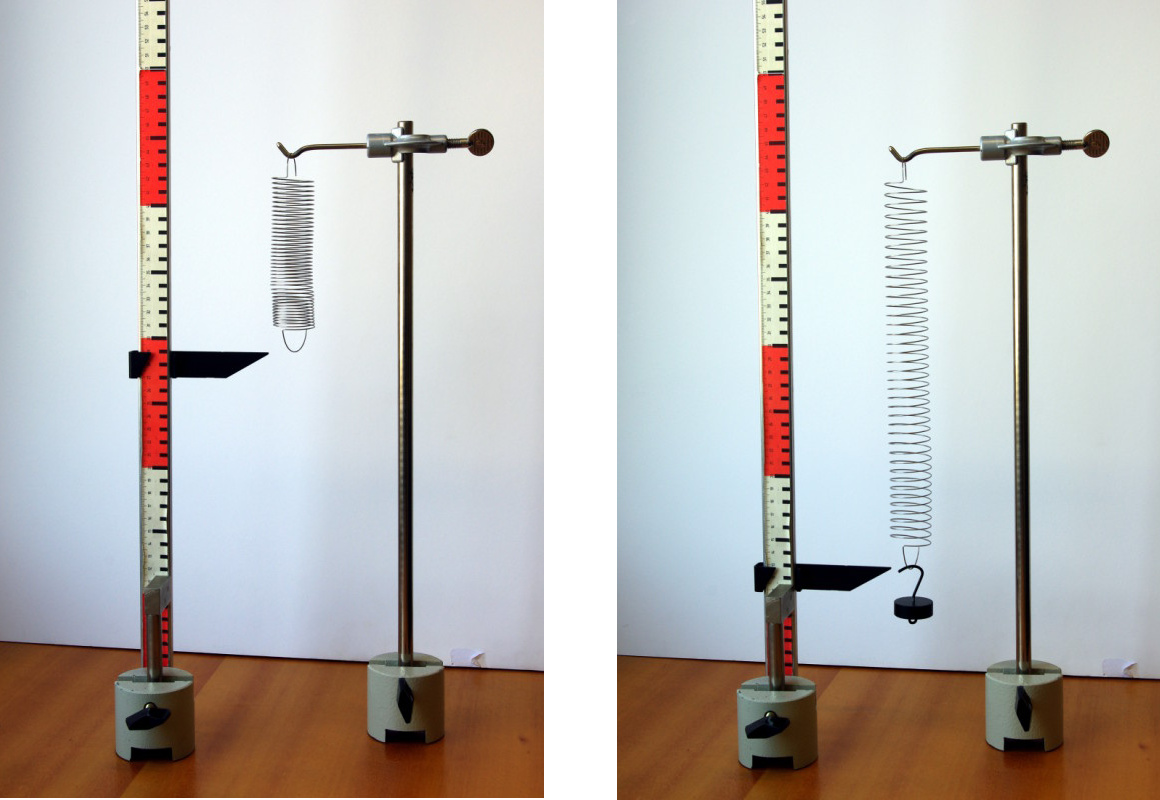
Figure 6.2: Elastic spring hanging from a
horizontal support.
Figure 6.2 shows a procedure
used to measure the elastic constant of a spring. An
object with weight
is hung on the spring,
which stretches the spring until it is in a position where
the elastic force balances the weight and the deformation
is measured. The value of the elastic constant is the
weight used,
, divided by deformation.
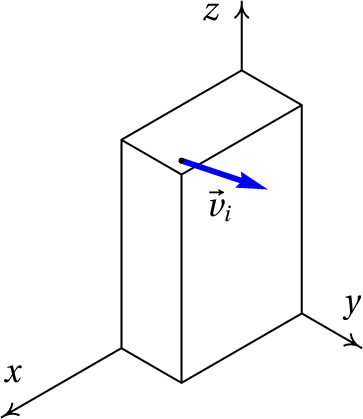
Figure 6.3: System with spring.
In the system of Figure 6.3,
the cylinder can slide along a fixed bar and is connected
to a spring with the other end fixed at a point O. At each
cylinder position P the deformation
of the spring is
considered positive if the spring is stretched, or
negative if the spring is compressed. Therefore, if the
unit vector
points in the direction that
increases, the value of the elastic force is
(it makes smaller
when it is
positive or makes it larger when it is negative). The dot
product:
(6.19)
Depends only on the variable
and, therefore, the
elastic force is conservative.
Using as reference value
(when the spring exerts no
force) the elastic potential energy is:
(6.20)
6.2.3. Potential energy of central forces
A central
force is a force that at each point of space points in the
radial direction (straight linethrough the origin) and
with magnitude that depends only on the distance
to
the origin:
(6.21)
As the dot product
depends only on the variable
,
central forces are always conservative and the associated
potential energy is equal to:
(6.22)
The reference position is usually chosen at infinity
because these forces are usually zero when the distance
is infinite. Two examples of central forces are the
gravitational force between particles and the electric
force between point charges.
6.3. Mechanical energy
Forces that do not depend on position
alone are nonconservative. For example the normal
force and the static frictional force between two surfaces
depend on the conditions in which the system is. Placing the
same body in the same position at a table, but with
different objects placed on top, the normal force has
different values. The kinetic frictional force is also
nonconservative. It depends on the normal force and also on
the direction of motion (direction of the velocity).
In the work and kinetic energy theorem
(equation 6.5), the resultant of
external forces can be written as the resultant of all
conservative forces plus the resultant of all nonconservative
forces.
(6.23)
The right side of the equation is the kinetic energy in the final position
, minus the kinetic energy in the initial position
(
. The first integral
on the left side of the equation is equal to the sum of the
integrals of all the conservative external forces acting on
the system and is equal to the decrease of the total
potential energy:
(6.24)
where
is the sum of all potential energies present
(gravitational, elastic, electric, etc.). Passing these
terms to the right side of the equation yields:
(6.25)
The mechanical energy is defined as
the sum of the potential plus the kinetic energy:
(6.26)
And this last equation equation is
the work and mechanical energy theorem
The integral on the left-hand side is the work performed by
all the non-conservative external forces, along the
trajectory; that is,
The work done by the nonconservative forces, along the
trajectory, is equal to the increase in mechanical energy
.
A consequence of this result is the
principle of conservation of mechanical
energy: when all the forces that do work on the
system are conservative, its mechanical energy remains
constant.
Notice that in the integral on the left-hand side of equation
6.27 the integration path is the
trajectory of the body. It may happen that the trajectory is
not previously known, but in any case it will be a single,
well defined curve. If the line integral were computed along
a curve different from the trajectory, its value would no
longer be equal to the increase in mechanical energy. The
negative sign in the definition of potential energy has to
do with the definition of mechanical energy as potential
plus kinetic energy.
It should also be noted that since the kinetic energy can
never be negative, the mechanical energy
at
any position in the trajectory is always greater than or
equal to the potential energy at that position.
6.3.1. Energy plots
The plot of the total potential energy
is very
useful in the analysis of
motion. Figure 6.4 shows an
example. The dashed curve represents the total potential
energy of the system, as a function of the position in the
trajectory ,
. The continuous line is the mechanical
energy; as it is a line parallel to the
axis, it is
concluded that there is conservation of mechanical energy
and the only forces that do work are all conservative.
Figure 6.4: Example of potential energy and
mechanical energy.
The regions of the plot where the straight line of
mechanical energy is below the potential energy curve are
positions where the system can never be, because the
mechanical energy is always greater than or equal to the
potential energy. For example, in the case of
Figure 6.4, the body could
never be at
,
or
. In order to reach those
positions, a nonconservative force would have to do
positive work, increasing the mechanical energy.
Equation 6.24 means that
is a primitive of
, time
−1. Therefore, we can conclud that
(6.28)
Namely, in the
intervals where
is increasing,
the resultant conservative force points in the negative
sense of
. And in the intervals where
is
decreasing, the resultant conservative force points in the
positive direction of
.
In the example shown in
figure 6.4, in the intervals
and
, where the potential
energy is decreasing, the tangential component of the
resultant force is positive, that is, points in the
direction in which the position
increases. In the
intervals
and
the
resultant force has negative tangential component (points
in the sense that
decreases). In the points
,
and
the tangential component of the resultant
force is zero. These points, where the value of the
tangential force is zero, are
called equilibrium point.
The mechanical energy can not be less than
−6.75. The mechanical energy line corresponds to a
value of 2.25 units. With this mechanical energy, the body
can only be moving in a neighborhood of the point
,
or in a neighborhood of
.
At points where the line of the mechanical energy of the
body cuts the curve of potential energy, the kinetic
energy is zero, and thus the body is at rest; however, the body does not
always remain at rest at these points, because the force
at these points is not zero.
For example, if at some time the body is in
, moving
in the direction in which
increases, it then continues
to move in the same direction until it stops near
;
at that point the force points in the negative direction
of
, which causes the body to return to the point
, but now with negative velocity. The body will
approach the point
, where the value of its speed
will be zero; At this point, as the tangential component
of the resultant force is in the positive direction of
, the body returns to the position
starting again
the same cycle.
6.4. Simple harmonic motion
Consider a cart with mass
on a horizontal surface,
connected to a spring with elastic constant
, As shown in
figure 6.5. If friction in wheel
axles, the mass of the wheels and the air resistance are
neglected, the only force that does work is the elastic
force of the spring and mechanical energy is conserved.
Figure 6.5: Cart oscillating on a horizontal surface.
The trajectory is a horizontal line. Choosing the origin O
for the position along the trajectory,
, in the position
where the spring is not deformed, the mechanical energy of
the system is,
(6.29)
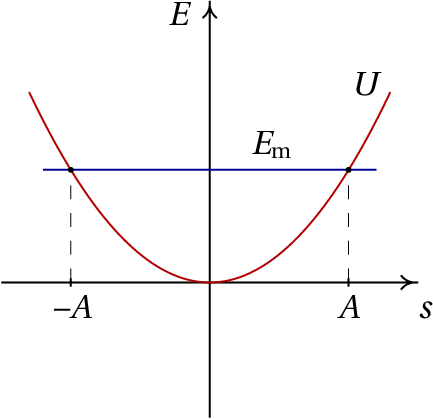
Figure 6.6 shows the plots of
potential energy and the constant mechanical energy. The
cart oscillates between two positions
and
,
where the velocity is zero, and each time it passes through
its kinetic energy is
maximum. The amplitude of
the oscillatory motion is
, which
depends on the value of the mechanical energy. The higher
the energy, the greater the amplitude.
Figure 6.6: Potential energy and mechanical energy
of a harmonic oscillator.
The relation between amplitude and mechanical energy is obtained by
substituting
in equation 6.29:
(6.30)
The amplitude and the mechanical energy are not
characteristic values of the oscillator, but are initial
conditions that depend on how the system is set in
motion. The equation of motion of the system can be obtained
by applying Newton's second law, or by differentiating the
expression of the mechanical energy
(equation 6.29) with respect to
time and solving for the tangential acceleration. The result
is:
(6.31)
This expression can be used to solve the kinematic equation
, with initial
condition
, to obtains the expression for
in
terms of
(6.32)
Equating this expression (in the case that
is positive)
to the derivative
and separating variables, we
obtain
(6.33)
Where time
is the instant when the cart passes
through the equilibrium position
. Solving the
integrals gives the expression for the position
in terms
of time
(6.34)
Where the constant
, called angular frequency, is
(6.35)
and
is a constant that depends on the choice of
the moment when
equals zero. The frequency, which is the
number of oscillations per unit time, is equal to,
(6.36)
And the period of
oscillation
is the inverse of
the frequency:
.
The expression 6.34 is the solution of
the differential equation
. Any other system in
which the second derivative of the variable equals the variable times
a negative constant is consider also a simple harmonic oscillator and
it has a solution similar to 6.34.
6.5. Kinetic energy of rotation
In a rigid body with translation motion, at every instant
all parts of the body move with the same speed
;
therefore, the total kinetic energy is equal to one half of
the total mass times the value of the velocity squared. In
the more general case of rotational and translation, to
compute the total kinetic energy we must take into account
that the speeds of different parts of the object are
different. As shown
in chapter 3, the
velocity of each point in the body in terms of the angular
velocity
and speed
of the origin, fixed point on the rigid body, is:
(6.37)
where
is the position of the point relative to
the origin O.
The total kinetic energy is obtained by adding the energies
of all the infinitesimal parts of the rigid body with mass
,
(6.38)
The value of the velocity squared is,
(6.39)
The magnitude of
is
, where
is the distance from the point to the
axis of rotation passing through point O, parallel to
. Replacing in the expression of the kinetic
energy we obtain,
(6.40)
The integral in the first term is equal to the total mass
. As mentioned in the section on the center of mass, the
only reference frame in which the mean value of the position
vector is null
(equation (5.15))
is when the origin is exactly in the center of mass. Thus,
if the reference point O is the center of mass, the third
integral is null and we obtain
(6.41)
Where
is the moment of inertia with respect
to an axis passing through the center of mass, parallel to
.
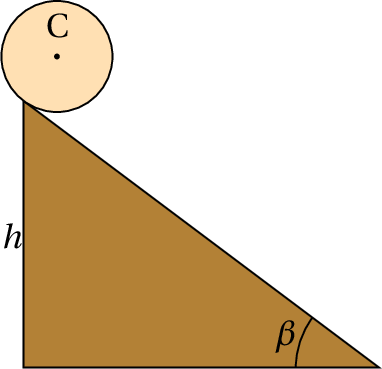
Example 6.3
A sphere of mass
and radius
starts moving from
rest at a height
on an incline with an angle
with the horizontal. The ball rotates on the incline without
sliding. Determine the value of the angular acceleration of
the sphere and the velocity of its center of mass when it
reaches the end of the incline.
Resolution. As the ball rotates without slipping,
the angle of rotation
is related to the position of
the center of mass C, according to the expression obtained
in chapter 3 for
wheels rolling without slipping:
We conclude that the system has a single degree of freedom,
which may be the angle
that the sphere rotates from
the initial instant at the top of the incline. The angular
velocity is
and the velocity of the
center of mass is
.
Choosing the Position
at the top of the incline, with
positive in the sense that the sphere descends and zero
gravitational potential energy at
, in any position
the ball has descended a height
, where
is the angle of
inclination of the incline. The total mechanical energy
is,
As long as the ball rotates without slipping, the
frictional force with the incline's surface is static
friction, which does not do any work. Ignoring the air
resistance, mechanical energy is conserved and its
derivative with respect to time is zero. By replacing the
expression of the moment of inertia of the sphere about its
center of mass,
, differentiating with respect
to time and equating to zero we obtain
And the expression for the angular acceleration
is,
As the sphere starts from rest, at the initial point its
kinetic energy is zero and at the lowest part of the incline
the kinetic energy will be equal to the change in
gravitational potential energy:
(6.42)
And the velocity of the center of mass C at the end of the
incline is
(6.43)
Questions
(To check your answer, click on it.)
The position of a particle as a function of time is
given by the expression
(SI units). Which of the
vectors in the list is perpendicular to the trajectory of
the particle at the instant
s?
A force with constant direction, sense and magnitude
acts on a particle. The magnitude of the force is 1.6
N. What is the work done by this force when the particle
moves a distance of 20 cm in a direction that makes 60°
with force?
0.28 J
160 mJ
0.68 J
28 J
16 J
In a simple harmonic oscillator formed by a body with
mass
hanging from a vertical spring with elastic
constant
, if the mass is quadrupled, which of the
statements is correct?
Its
oscillation frequency doubles.
Its period doubles.
The amplitude doubles.
Its
mechanical energy doubles.
Its
potential energy doubles.
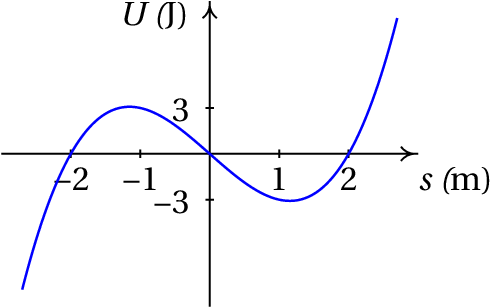
The figure shows the plot of the potential energy
of a particle in terms of the position along the
trajectory,
. If the particle is oscillating around the
position
, with mechanical energy equal to 2 J, what
is the maximum value of its kinetic energy?
-3 J
3 J
0
2 J
5 J
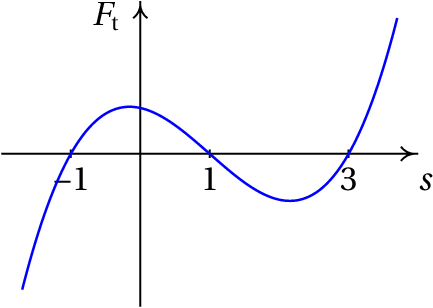
The figure shows the plot of the tangential component of
the resultant force
on a particle. How many equilibrium points
are there in the region shown in the plot?
0
1
2
3
4
Problems
Compute the line integral of the force in
Example 6.2:
, From the origin O to the
point P in the plane
, with coordinates
, along
the shortest arc of the circumference
(center in
,
and radius 1) which passes through
the origin and the point P.
The law of
universal gravitation states that any celestial
body of mass
produces an attractive force on any other body of mass
, given by the expression:
where
is the universal gravitational constant,
is the distance between the two bodies and
is the radial unit vector, which points from the body of
mass
to the body of mass
. (a) Determine the
expression for the gravitational potential energy
due to the body of mass
. (b)
Taking into account the result of the previous part, how
can the result in equation 6.17,
, be justified for the gravitational
potential energy of an object on Earth?
In a pole vault, a 70 kg athlete uses a
uniform 4.5 kg stick, 4.9 m long. The athlete's jump has
three phases: first the athlete runs with its center of
gravity at 1 m above the ground and with the center of
gravity of the pole at 1.5 m above the ground in height,
until reaching a speed of 9 m/s at the instant when he
sticks the tip of the pole to the ground. In the second
phase, the energy of the run is transferred to the pole,
which deforms and then recovers its shape in a vertical
position, raising the athlete to a height close to the
height of the bar. Finally, the athlete pushes the pole
towards the ground, gaining some additional energy that
makes his center of gravity go higher and up to 5.8 m
above the ground, enough to pass the bar at 5.6
m. Assuming there are no energy losses, compute the
mechanical energy transferred to the jumper when he pushes
the pole in the direction of the ground.
Solve
problem 7
of chapter 4 by
applying the work and mechanical energy theorem. Is the
force exerted by the block on the cone, while the cone
penetrates the block, conservative?
In a system such as the one shown in
figure 6.5, the cart has a mass of
450 g. The cart is moved 5 cm from the equilibrium
position and released from rest, starting to oscillate
with a period of 1.2 s. Determine:
The amplitude of the oscillations.
The elastic constant of the spring.
The maximum speed of the cart.
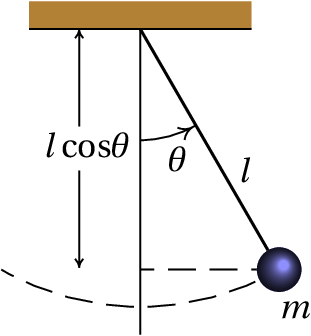
A simple pendulum is composed of a
sphere of mass
hanging from a very fine string with
length
and negligible mass. When the sphere starts to
move from rest, there is a single degree of freedom, which
can be the angle
which the string does with the
vertical. (a) Determine the expression for the
mechanical energy, as a function of the angle
and
its derivative
, using as position of zero
potential energy
. (b) Neglecting
the air resistance, the mechanical energy remains constant
and its derivative with respect to time is
zero. Differentiate the expression of the mechanical
energy with respect to time and equate it to zero to find
the expression for
in terms of the angle.
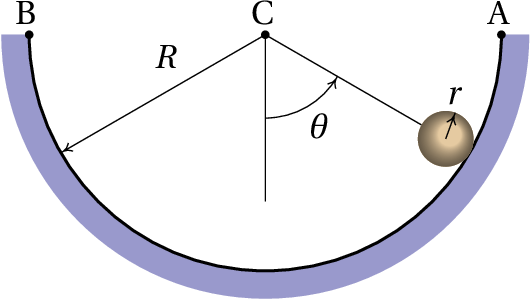
A sphere of radius
rolls without
sliding, into a semicircular gutter of radius
, which is on
a vertical plane (see figure).
Show that, in terms of the derivative of the angle
, the kinetic energy of the sphere is
Neglecting the resistance of the air, the mechanical
energy is constant and its derivative with respect to
time is zero. Differentiate the expression of the
mechanical energy with respect to time and equate it to
zero to find the expression of the angular
acceleration
in terms of angle.
Among what values must the mechanical energy be so
that the sphere remains oscillating within the
gutter?
From the result of part b, determine the
expression for
, at the limit when the
radius of the sphere is much smaller than the radius
of the gutter (
) and explain why the
result is different from the result obtained for the
simple pendulum in
problem 6.
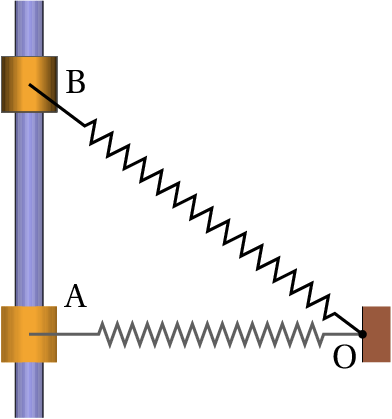
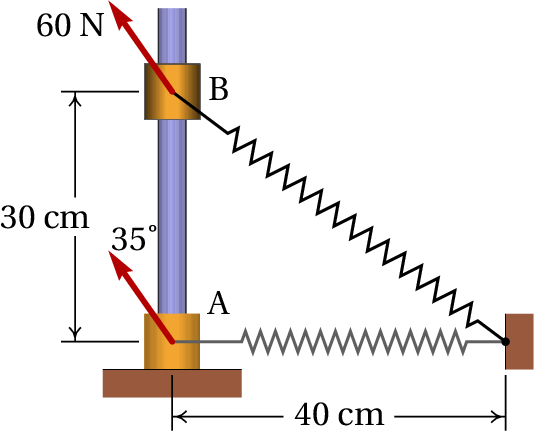
A cylinder with mass of 80 g slides from
rest at point A to point B due to a constant external force
of 60 N; The normal length of the spring is 30 cm and its
elastic constant is 6 N/cm. Assuming there is no friction
with the fixed bar, determine the speed at which the
cylinder reaches point B.
Solve
problem 8
of chapter 5 with the
principle of conservation of mechanical energy.
A cylinder rolls down an incline of
height
, starting from rest, rolling without
slipping. Determine the velocity of the center of mass of
the cylinder when it reaches the end of the
incline. Compare with the result of
example 6.3 for a sphere. Which
of the two bodies descends faster, the sphere or the
cylinder?
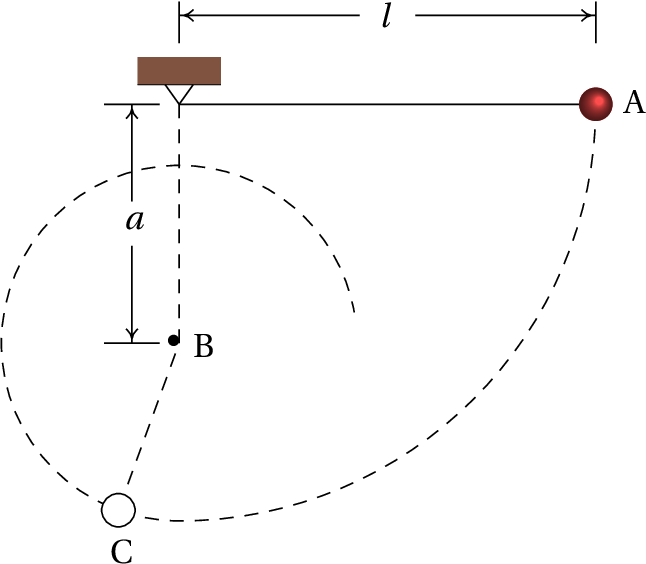
A sphere hung with a string of length
is dropped from the rest in position A, as shown in the
figure. When the string reaches the vertical position, it
comes into contact with a fixed nail at point B, which
causes the sphere to describe an arc of radius less than
. Find the minimum value that
should have so that
the sphere trajectory is a circle centered on B (if
is
not large enough, the string is no stretched while the
sphere goes up and the sphere does not reach the top of
the circle).
Consider a projectile that is launched
from the ground, in a room where there is vacuum, with an
initial velocity
making an angle
with the
horizontal.
Determine the time the projectile takes until it
reaches the highest point in its trajectory, where the
vertical velocity is zero, and the position at that
point.
Based on the result of the previous part, show that
the horizontal range of the projectile (horizontal
distance from where it is launched to where it falls)
is equal to:
(6.44)
Answers
Questions: 1. C. 2. B. 3.
B. 4. E. 5. D.
Problems
(a)
(b) For any distance
, the Taylor series of
is:
The first term is a constant, which can be ignored. In the
second term, if
is the radius of the Earth, then
is the height
from the surface of the Earth
and
shall be equal to the constant
. Ignoring the rest of the series, which for values of
much smaller than
does not significantly change
the sum of the first two terms, we obtain
.
317.4 J
24 696 N/m2. The force of the block is not
conservative, because it only acts when the cone is
penetrating. If the cone rose again after penetrating the
block, the block would no longer produce any force on the
cone.
(a) 5 cm. (b) 12.34 N/m. (c) 26.2
cm/sec.
(a)
(b)
(a) Note that the velocity of the center of mass
of the sphere is
and the condition of
rolling without slipping implies that the angular velocity
of the sphere is equal to that speed divided by
.
(b)
(c) Greater than
and less than
zero. If the mechanical energy is exactly equal to
, the sphere does not oscillate, but remains
at rest at the lowest point of the gutter. (d) The
absolute value of
is smaller by a factor
of 5/7 because some of the gravitational potential energy
is transformed into kinetic energy of rotation of the
sphere. The kinetic energy of rotation is always 2/5 of
the kinetic energy of translation, regardless of the value
of
. Therefore, at the limit
also 2/7 of the gravitational energy is converted into
rotational energy and only the remaining 5/7 increase
.
11.74 m / s.
5.274 s -1
. The sphere descends faster
than the cylinder, because it has less moment of
inertia.
(a)
,
Wrong
This vector is not perpendicular to the trajectory, because
its dot product with the velocity,
, is not equal to
zero.
(Click to continue)
Wrong
This vector is not perpendicular to the trajectory, because
its dot product with the velocity,
, is not equal to
zero.
(Click to continue)
Correct
The easiest way to find a vector perpendicular to velocity,
, is to exchange the
components and change the sign of one of them:
, Which is 4 times the
vector of letter C.
(Click to continue)
Wrong
This vector is not perpendicular to the trajectory, because
its dot product with the velocity,
, is not equal to
zero.
(Click to continue)
Wrong
This vector is not perpendicular to the trajectory, because
its dot product with the velocity,
, is not equal to
zero.
(Click to continue)
Wrong
The work of a constant force is equal to the tangential
component of the force times the displacement. The
tangential force is equal to
and not
.
(Click to continue)
Correct
(Click to continue)
Wrong
The work of a constant force is equal to the tangential
component of the force times the displacement.
(Click to continue)
Wrong
The tangential force is equal to
and
not
. And the force, in newton, can not
be multiplied by the displacement in centimeters, because a
newton equals kg·m/s2. Give the displacement in
meters.
(Click to continue)
Wrong
The force, in newton, can not be multiplied by the
displacement in centimeters, because a newton equals
kg·m/s2. Give the displacement in meters.
(Click to continue)
Wrong
The frequency is directly proportional to the angular
frequency, which is inversely proportional to the square
root of the mass. Thus, if the mass is quadrupled, the
frequency decreases by half.
(Click to continue)
Correct
The frequency is directly proportional to the angular
frequency, which is inversely proportional to the square
root of the mass. Thus, if the mass is quadrupled, the
frequency decreases by half and the period, inverse of the
frequency, doubles.
(Click to continue)
Wrong
The amplitude depends only on the mechanical energy, which
can be altered by changing the initial conditions (initial
position and velocity) independently of the mass value.
(Click to continue)
Wrong
The mechanical energy can be changed by changing the
initial conditions (initial position and velocity)
regardless of the value of the mass.
(Click to continue)
Wrong
The total elastic plus gravitational potential energy
depends only on the elastic constant and not on the
mass.
(Click to continue)
Wrong
The kinetic energy can not be negative.
(Click to continue)
Wrong
With this kinetic energy, the potential energy would be
, which is not the minimum value that the potential
energy can have.
(Click to continue)
Wrong
When the kinetic energy is zero, the velocity is zero. As
the particle oscillates, it will have velocity different
from zero at some points and, therefore, kinetic energy
greater than zero.
(Click to continue)
Wrong
With this kinetic energy, the potential energy would be
, Which is not the minimum value that the potential
energy can have.
(Click to continue)
Correct
The maximum kinetic energy is equal to the mechanical
energy, 2 J, minus the minimum potential energy, −3
J.
(Click to continue)
Wrong
The equilibrium points are the roots of the function
.
(Click to continue)
Wrong
The equilibrium points are the roots of the function
.
(Click to continue)
Wrong
The equilibrium points are the roots of the function
.
(Click to continue)
Correct
The equilibrium points are the roots of the function
.
(Click to continue)
Wrong
The equilibrium points are the roots of the function
.




This vector is not perpendicular to the trajectory, because its dot product with the velocity, , is not equal to zero.
(Click to continue)